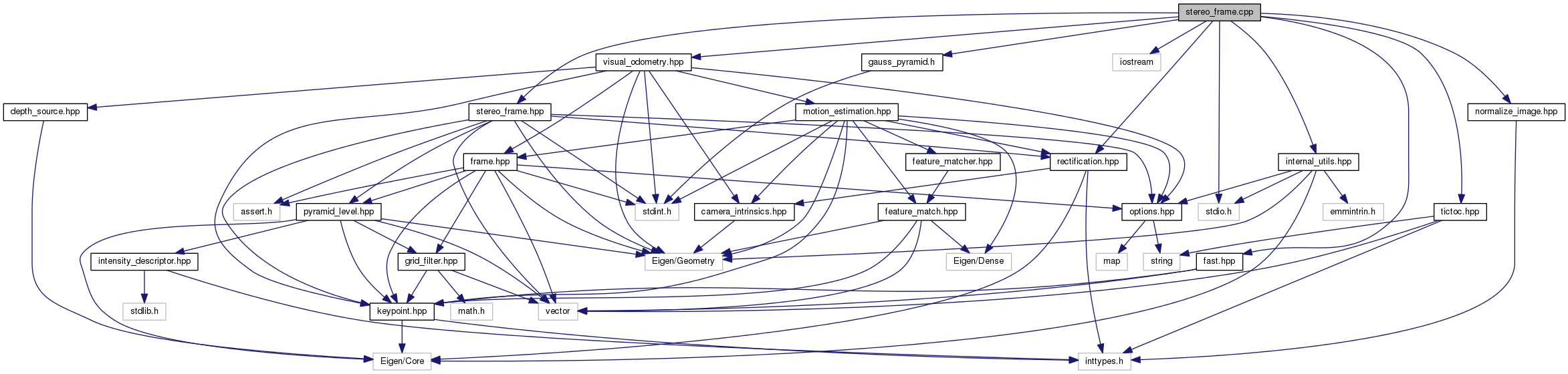
#include "stereo_frame.hpp"#include <stdio.h>#include <iostream>#include "visual_odometry.hpp"#include "internal_utils.hpp"#include "gauss_pyramid.h"#include "fast.hpp"#include "tictoc.hpp"#include "rectification.hpp"#include "normalize_image.hpp"
Include dependency graph for stereo_frame.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | fovis |
quick and dirty profiling tool. inspired by the matlab tic/toc command | |
Defines | |
| #define | ALIGNMENT 16 |
Functions | |
| static bool | fovis::keypoint_rect_v_comparator (const KeypointData &a, const KeypointData &b) |
Define Documentation
| #define ALIGNMENT 16 |
Definition at line 16 of file stereo_frame.cpp.