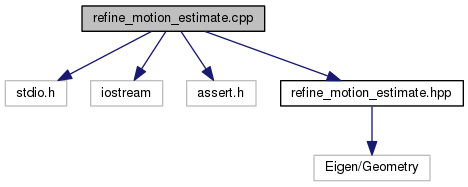
Include dependency graph for refine_motion_estimate.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | fovis |
quick and dirty profiling tool. inspired by the matlab tic/toc command | |
Defines | |
| #define | dbg(...) |
| #define | dump(v) std::cerr << #v << " : " << (v) << "\n" |
| #define | dumpT(v) std::cerr << #v << " : " << (v).transpose() << "\n" |
| #define | USE_ESM |
Functions | |
| static void | fovis::computeProjectionJacobian (const Eigen::Matrix< double, 6, 1 > ¶ms, double fx, double px, double py, const Eigen::Matrix< double, 4, Eigen::Dynamic > &points, Eigen::Matrix< double, Eigen::Dynamic, 6 > *result, int result_row_offset) |
| static void | fovis::computeReprojectionError (const Eigen::Matrix< double, 4, Eigen::Dynamic > &points, const Eigen::Matrix< double, 2, Eigen::Dynamic > &ref_projections, const Eigen::Matrix< double, 3, 4 > &K, const Eigen::Isometry3d &motion, Eigen::VectorXd *err, int err_offset) |
| static void | fovis::computeReverseProjectionJacobian (const Eigen::Matrix< double, 6, 1 > ¶ms, double fx, double px, double py, const Eigen::Matrix< double, 4, Eigen::Dynamic > &points, Eigen::Matrix< double, Eigen::Dynamic, 6 > *result, int result_row_offset) |
| static Eigen::Isometry3d | fovis::isometryFromParams (const Eigen::Matrix< double, 6, 1 > ¶ms) |
| static Eigen::Matrix< double, 6, 1 > | fovis::isometryToParams (const Eigen::Isometry3d &M) |
| Eigen::Isometry3d | fovis::refineMotionEstimate (const Eigen::Matrix< double, 4, Eigen::Dynamic > &points, const Eigen::Matrix< double, 2, Eigen::Dynamic > &ref_projections, double fx, double px, double py, const Eigen::Isometry3d &initial_estimate, int max_iterations) |
| void | fovis::refineMotionEstimateBidirectional (const Eigen::Matrix< double, 4, Eigen::Dynamic > &ref_points, const Eigen::Matrix< double, 2, Eigen::Dynamic > &ref_projections, const Eigen::Matrix< double, 4, Eigen::Dynamic > &target_points, const Eigen::Matrix< double, 2, Eigen::Dynamic > &target_projections, double fx, double px, double py, const Eigen::Isometry3d &initial_estimate, int max_iterations, Eigen::Isometry3d *result, Eigen::MatrixXd *result_covariance) |
Define Documentation
| #define dbg | ( | ... | ) |
Definition at line 11 of file refine_motion_estimate.cpp.
| #define dump | ( | v | ) | std::cerr << #v << " : " << (v) << "\n" |
Definition at line 7 of file refine_motion_estimate.cpp.
| #define dumpT | ( | v | ) | std::cerr << #v << " : " << (v).transpose() << "\n" |
Definition at line 8 of file refine_motion_estimate.cpp.
| #define USE_ESM |
Definition at line 13 of file refine_motion_estimate.cpp.