#include <BodyRTC.h>
Public Types | |
| enum | emg_reason { EMG_NONE, EMG_SERVO_ERROR, EMG_FZ } |
Public Member Functions | |
| int | addJointGroup (const char *gname, const std::vector< int >jids) |
| BodyRTC (RTC::Manager *manager=&RTC::Manager::instance()) | |
| bool | checkEmergency (emg_reason &o_reason, int &o_id) |
| void | createInPort (const std::string &config) |
| void | createOutPort (const std::string &config) |
| std::vector< int > | getJointGroup (const char *gname) |
| void | getStatus (OpenHRP::RobotHardwareService::RobotState *rs) |
| void | getStatus2 (OpenHRP::RobotHardwareService::RobotState2 *rs) |
| int | lengthDigitalInput () |
| int | lengthDigitalOutput () |
| bool | names2ids (const std::vector< std::string > &i_names, std::vector< int > &o_ids) |
| RTC::ReturnCode_t | onActivated (RTC::UniqueId ec_id) |
| RTC::ReturnCode_t | onDeactivated (RTC::UniqueId ec_id) |
| bool | postOneStep () |
| bool | power (int jid, bool turnon) |
| bool | power (const char *jname, bool turnon) |
| bool | preOneStep () |
| int | readCalibState (const int i) |
| void | readDataPorts () |
| bool | readDigitalInput (char *o_din) |
| bool | readDigitalOutput (char *o_dout) |
| int | readPowerState (const int i) |
| int | readServoState (const int i) |
| bool | resetPosition () |
| bool | servo (const char *jname, bool turnon) |
| bool | servo (int jid, bool turnon) |
| bool | setServoErrorLimit (const char *i_jname, double i_limit) |
| RTC::ReturnCode_t | setup () |
| void | writeDataPorts (double time) |
| bool | writeDigitalOutput (const char *i_dout) |
| bool | writeDigitalOutputWithMask (const char *i_dout, const char *i_mask) |
| virtual | ~BodyRTC (void) |
Static Public Member Functions | |
| static void | moduleInit (RTC::Manager *) |
Public Attributes | |
| int | m_emergencyId |
| BodyRTC::emg_reason | m_emergencyReason |
| std::vector< double > | m_servoErrorLimit |
Private Attributes | |
| std::vector< hrp::Vector3 > | accels |
| std::vector< double > | angles |
| std::vector < OpenHRP::RobotHardwareService::SwitchStatus > | calib_status |
| std::vector< double > | commands |
| int | dummy |
| std::vector< hrp::dvector6 > | forces |
| std::vector< hrp::Vector3 > | gyros |
| std::vector< InPortHandlerBase * > | m_inports |
| std::map< std::string, std::vector< int > > | m_jointGroups |
| hrp::Vector3 | m_lastServoOn_p |
| hrp::Matrix33 | m_lastServoOn_R |
| std::vector< OutPortHandlerBase * > | m_outports |
| bool | m_resetPosition |
| RTC::CorbaPort | m_RobotHardwareServicePort |
| RobotHardwareServicePort | m_service0 |
| std::vector < OpenHRP::RobotHardwareService::SwitchStatus > | power_status |
| std::vector < OpenHRP::RobotHardwareService::SwitchStatus > | servo_status |
Static Private Attributes | |
| static const char * | bodyrtc_spec [] |
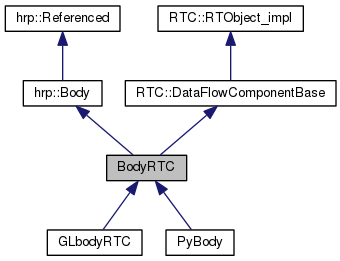
Detailed Description
Member Enumeration Documentation
| enum BodyRTC::emg_reason |
Constructor & Destructor Documentation
| BodyRTC::BodyRTC | ( | RTC::Manager * | manager = &RTC::Manager::instance() | ) |
Definition at line 29 of file BodyRTC.cpp.
| BodyRTC::~BodyRTC | ( | void | ) | [virtual] |
Definition at line 39 of file BodyRTC.cpp.
Member Function Documentation
| int BodyRTC::addJointGroup | ( | const char * | gname, |
| const std::vector< int > | jids | ||
| ) | [inline] |
| bool BodyRTC::checkEmergency | ( | emg_reason & | o_reason, |
| int & | o_id | ||
| ) |
Definition at line 494 of file BodyRTC.cpp.
| void BodyRTC::createInPort | ( | const std::string & | config | ) |
Definition at line 140 of file BodyRTC.cpp.
| void BodyRTC::createOutPort | ( | const std::string & | config | ) |
Definition at line 219 of file BodyRTC.cpp.
| std::vector<int> BodyRTC::getJointGroup | ( | const char * | gname | ) | [inline] |
| void BodyRTC::getStatus | ( | OpenHRP::RobotHardwareService::RobotState * | rs | ) |
Definition at line 414 of file BodyRTC.cpp.
| void BodyRTC::getStatus2 | ( | OpenHRP::RobotHardwareService::RobotState2 * | rs | ) |
Definition at line 459 of file BodyRTC.cpp.
| void BodyRTC::moduleInit | ( | RTC::Manager * | manager | ) | [static] |
Reimplemented in PyBody, and GLbodyRTC.
Definition at line 732 of file BodyRTC.cpp.
| bool BodyRTC::names2ids | ( | const std::vector< std::string > & | i_names, |
| std::vector< int > & | o_ids | ||
| ) |
Definition at line 397 of file BodyRTC.cpp.
| RTC::ReturnCode_t BodyRTC::onActivated | ( | RTC::UniqueId | ec_id | ) | [inline, virtual] |
Reimplemented from RTC::RTObject_impl.
| RTC::ReturnCode_t BodyRTC::onDeactivated | ( | RTC::UniqueId | ec_id | ) | [inline, virtual] |
Reimplemented from RTC::RTObject_impl.
| bool BodyRTC::postOneStep | ( | ) |
Definition at line 569 of file BodyRTC.cpp.
| bool BodyRTC::power | ( | int | jid, |
| bool | turnon | ||
| ) | [inline] |
| bool BodyRTC::power | ( | const char * | jname, |
| bool | turnon | ||
| ) |
Definition at line 629 of file BodyRTC.cpp.
| bool BodyRTC::preOneStep | ( | ) |
Definition at line 521 of file BodyRTC.cpp.
Definition at line 57 of file BodyRTC.cpp.
| bool BodyRTC::readDigitalInput | ( | char * | o_din | ) |
| bool BodyRTC::readDigitalOutput | ( | char * | o_dout | ) |
| bool BodyRTC::resetPosition | ( | ) | [inline] |
| bool BodyRTC::servo | ( | const char * | jname, |
| bool | turnon | ||
| ) |
Definition at line 605 of file BodyRTC.cpp.
| bool BodyRTC::servo | ( | int | jid, |
| bool | turnon | ||
| ) | [inline] |
| bool BodyRTC::setServoErrorLimit | ( | const char * | i_jname, |
| double | i_limit | ||
| ) |
Definition at line 462 of file BodyRTC.cpp.
Definition at line 65 of file BodyRTC.cpp.
| void BodyRTC::writeDataPorts | ( | double | time | ) |
Definition at line 50 of file BodyRTC.cpp.
| bool BodyRTC::writeDigitalOutput | ( | const char * | i_dout | ) |
| bool BodyRTC::writeDigitalOutputWithMask | ( | const char * | i_dout, |
| const char * | i_mask | ||
| ) |
Member Data Documentation
std::vector<hrp::Vector3> BodyRTC::accels [private] |
std::vector<double> BodyRTC::angles [private] |
const char * BodyRTC::bodyrtc_spec [static, private] |
{
"implementation_id", "BodyRTC",
"type_name", "BodyRTC",
"description", "BodyRTC component",
"version", "0.1",
"vendor", "AIST",
"category", "Generic",
"activity_type", "DataFlowComponent",
"max_instance", "10",
"language", "C++",
"lang_type", "compile",
""
}
std::vector<OpenHRP::RobotHardwareService::SwitchStatus> BodyRTC::calib_status [private] |
std::vector<double> BodyRTC::commands [private] |
int BodyRTC::dummy [private] |
std::vector<hrp::dvector6> BodyRTC::forces [private] |
std::vector<hrp::Vector3> BodyRTC::gyros [private] |
std::vector<InPortHandlerBase *> BodyRTC::m_inports [private] |
Reimplemented from RTC::RTObject_impl.
std::map<std::string, std::vector<int> > BodyRTC::m_jointGroups [private] |
hrp::Vector3 BodyRTC::m_lastServoOn_p [private] |
hrp::Matrix33 BodyRTC::m_lastServoOn_R [private] |
std::vector<OutPortHandlerBase *> BodyRTC::m_outports [private] |
Reimplemented from RTC::RTObject_impl.
bool BodyRTC::m_resetPosition [private] |
RobotHardwareServicePort BodyRTC::m_service0 [private] |
| std::vector<double> BodyRTC::m_servoErrorLimit |
std::vector<OpenHRP::RobotHardwareService::SwitchStatus> BodyRTC::power_status [private] |
std::vector<OpenHRP::RobotHardwareService::SwitchStatus> BodyRTC::servo_status [private] |
The documentation for this class was generated from the following files: