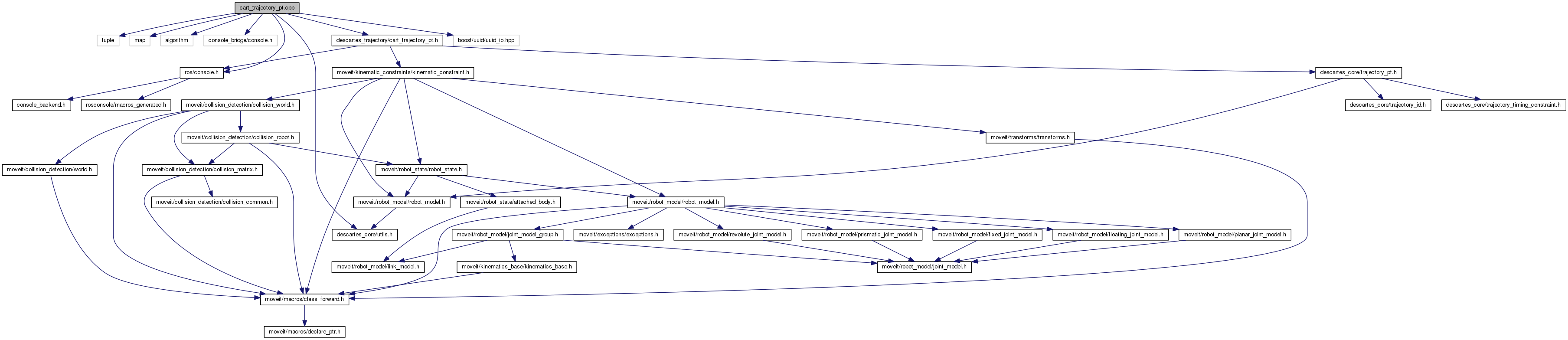
#include <tuple>#include <map>#include <algorithm>#include <console_bridge/console.h>#include <ros/console.h>#include <boost/uuid/uuid_io.hpp>#include "descartes_trajectory/cart_trajectory_pt.h"#include <descartes_core/utils.h>
Include dependency graph for src/cart_trajectory_pt.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | descartes_trajectory |
Defines | |
| #define | NOT_IMPLEMENTED_ERR(ret) |
Functions | |
| double | descartes_trajectory::distance (const std::vector< double > &j1, const std::vector< double > &j2) |
| EigenSTL::vector_Affine3d | descartes_trajectory::uniform (const TolerancedFrame &frame, const double orient_increment, const double pos_increment) |
Variables | |
| const double | EQUALITY_TOLERANCE = 0.0001f |
Define Documentation
| #define NOT_IMPLEMENTED_ERR | ( | ret | ) |
Value:
logError("%s not implemented", __PRETTY_FUNCTION__); \
return ret;
Definition at line 34 of file src/cart_trajectory_pt.cpp.
Variable Documentation
| const double EQUALITY_TOLERANCE = 0.0001f |
Definition at line 38 of file src/cart_trajectory_pt.cpp.