This class converts the costmap_2d into dynamic obstacles. More...
#include <costmap_to_dynamic_obstacles.h>
Public Member Functions | |
| virtual void | compute () |
| This method performs the actual work (conversion of the costmap to obstacles) | |
| CostmapToDynamicObstacles () | |
| Constructor. | |
| ObstacleArrayConstPtr | getObstacles () |
| Get a shared instance of the current obstacle container. | |
| virtual void | initialize (ros::NodeHandle nh) |
| Initialize the plugin. | |
| virtual void | setCostmap2D (costmap_2d::Costmap2D *costmap) |
| Pass a pointer to the costmap to the plugin. | |
| virtual void | setOdomTopic (const std::string &odom_topic) |
| Set name of robot's odometry topic. | |
| virtual void | updateCostmap2D () |
| Get updated data from the previously set Costmap2D. | |
| void | visualize (const std::string &name, const cv::Mat &image) |
| OpenCV Visualization. | |
| virtual | ~CostmapToDynamicObstacles () |
| Destructor. | |
Protected Member Functions | |
| void | getContour (unsigned int idx, std::vector< Point_t > &contour) |
| Gets the last observed contour of a object and converts it from [px] to [m]. | |
| Point_t | getEstimatedVelocityOfObject (unsigned int idx) |
| Converts the estimated velocity of a tracked object to m/s and returns it. | |
| void | updateObstacleContainer (ObstacleArrayPtr obstacles) |
| Thread-safe update of the internal obstacle container (that is shared using getObstacles() from outside this class) | |
Private Member Functions | |
| void | odomCallback (const nav_msgs::Odometry::ConstPtr &msg) |
| modifications at runtime | |
| void | reconfigureCB (CostmapToDynamicObstaclesConfig &config, uint32_t level) |
| Callback for the dynamic_reconfigure node. | |
Private Attributes | |
| std::unique_ptr < BackgroundSubtractor > | bg_sub_ |
| cv::Ptr< BlobDetector > | blob_det_ |
| costmap_2d::Costmap2D * | costmap_ |
| cv::Mat | costmap_mat_ |
| dynamic_reconfigure::Server < CostmapToDynamicObstaclesConfig > * | dynamic_recfg_ |
| Point_t | ego_vel_ |
| cv::Mat | fg_mask_ |
| std::vector< cv::KeyPoint > | keypoints_ |
| boost::mutex | mutex_ |
| ObstacleArrayPtr | obstacles_ |
| ros::Subscriber | odom_sub_ |
| std::string | odom_topic_ = "/odom" |
| bool | publish_static_obstacles_ = true |
| std::unique_ptr< CTracker > | tracker_ |
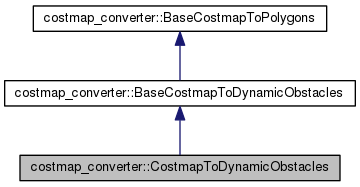
Detailed Description
This class converts the costmap_2d into dynamic obstacles.
Static obstacles are treated as point obstacles.
Definition at line 77 of file costmap_to_dynamic_obstacles.h.
Constructor & Destructor Documentation
Constructor.
Definition at line 11 of file costmap_to_dynamic_obstacles.cpp.
Destructor.
Definition at line 18 of file costmap_to_dynamic_obstacles.cpp.
Member Function Documentation
| void costmap_converter::CostmapToDynamicObstacles::compute | ( | ) | [virtual] |
This method performs the actual work (conversion of the costmap to obstacles)
Implements costmap_converter::BaseCostmapToPolygons.
Definition at line 144 of file costmap_to_dynamic_obstacles.cpp.
| void costmap_converter::CostmapToDynamicObstacles::getContour | ( | unsigned int | idx, |
| std::vector< Point_t > & | contour | ||
| ) | [protected] |
Gets the last observed contour of a object and converts it from [px] to [m].
- Parameters:
-
[in] idx Index of the tracked object in the tracker [out] contour vector of Point_t, which represents the last observed contour in [m] in x,y,z coordinates
Definition at line 445 of file costmap_to_dynamic_obstacles.cpp.
| Point_t costmap_converter::CostmapToDynamicObstacles::getEstimatedVelocityOfObject | ( | unsigned int | idx | ) | [protected] |
Converts the estimated velocity of a tracked object to m/s and returns it.
- Parameters:
-
idx Index of the tracked object in the tracker
- Returns:
- Point_t, which represents velocity in [m/s] of object(idx) in x,y,z coordinates
Definition at line 370 of file costmap_to_dynamic_obstacles.cpp.
Get a shared instance of the current obstacle container.
- Remarks:
- If compute() or startWorker() has not been called before, this method returns an empty instance!
- Returns:
- Shared instance of the current obstacle container
Reimplemented from costmap_converter::BaseCostmapToPolygons.
Definition at line 358 of file costmap_to_dynamic_obstacles.cpp.
| void costmap_converter::CostmapToDynamicObstacles::initialize | ( | ros::NodeHandle | nh | ) | [virtual] |
Initialize the plugin.
- Parameters:
-
nh Nodehandle that defines the namespace for parameters
Implements costmap_converter::BaseCostmapToPolygons.
Definition at line 24 of file costmap_to_dynamic_obstacles.cpp.
| void costmap_converter::CostmapToDynamicObstacles::odomCallback | ( | const nav_msgs::Odometry::ConstPtr & | msg | ) | [private] |
modifications at runtime
Callback for the odometry messages of the observing robot.
Used to convert the velocity of obstacles to the /map frame.
- Parameters:
-
msg The Pointer to the nav_msgs::Odometry of the observing robot
Definition at line 380 of file costmap_to_dynamic_obstacles.cpp.
| void costmap_converter::CostmapToDynamicObstacles::reconfigureCB | ( | CostmapToDynamicObstaclesConfig & | config, |
| uint32_t | level | ||
| ) | [private] |
Callback for the dynamic_reconfigure node.
This callback allows to modify parameters dynamically at runtime without restarting the node
- Parameters:
-
config Reference to the dynamic reconfigure config level Dynamic reconfigure level
Definition at line 397 of file costmap_to_dynamic_obstacles.cpp.
| void costmap_converter::CostmapToDynamicObstacles::setCostmap2D | ( | costmap_2d::Costmap2D * | costmap | ) | [virtual] |
Pass a pointer to the costmap to the plugin.
- See also:
- updateCostmap2D
- Parameters:
-
costmap Pointer to the costmap2d source
Implements costmap_converter::BaseCostmapToPolygons.
Definition at line 332 of file costmap_to_dynamic_obstacles.cpp.
| virtual void costmap_converter::CostmapToDynamicObstacles::setOdomTopic | ( | const std::string & | odom_topic | ) | [inline, virtual] |
Set name of robot's odometry topic.
- Warning:
- The method must be called before initialize()
Some plugins might require odometry information to compensate the robot's ego motion
- Parameters:
-
odom_topic topic name
Reimplemented from costmap_converter::BaseCostmapToPolygons.
Definition at line 132 of file costmap_to_dynamic_obstacles.h.
| void costmap_converter::CostmapToDynamicObstacles::updateCostmap2D | ( | ) | [virtual] |
Get updated data from the previously set Costmap2D.
- See also:
- setCostmap2D
Implements costmap_converter::BaseCostmapToPolygons.
Definition at line 342 of file costmap_to_dynamic_obstacles.cpp.
| void costmap_converter::CostmapToDynamicObstacles::updateObstacleContainer | ( | ObstacleArrayPtr | obstacles | ) | [protected] |
Thread-safe update of the internal obstacle container (that is shared using getObstacles() from outside this class)
- Parameters:
-
obstacles Updated obstacle container
Definition at line 364 of file costmap_to_dynamic_obstacles.cpp.
| void costmap_converter::CostmapToDynamicObstacles::visualize | ( | const std::string & | name, |
| const cv::Mat & | image | ||
| ) |
OpenCV Visualization.
- Parameters:
-
name Id/name of the opencv window image Image to be visualized
Definition at line 466 of file costmap_to_dynamic_obstacles.cpp.
Member Data Documentation
std::unique_ptr<BackgroundSubtractor> costmap_converter::CostmapToDynamicObstacles::bg_sub_ [private] |
Definition at line 177 of file costmap_to_dynamic_obstacles.h.
cv::Ptr<BlobDetector> costmap_converter::CostmapToDynamicObstacles::blob_det_ [private] |
Definition at line 178 of file costmap_to_dynamic_obstacles.h.
Definition at line 173 of file costmap_to_dynamic_obstacles.h.
cv::Mat costmap_converter::CostmapToDynamicObstacles::costmap_mat_ [private] |
Definition at line 174 of file costmap_to_dynamic_obstacles.h.
dynamic_reconfigure::Server<CostmapToDynamicObstaclesConfig>* costmap_converter::CostmapToDynamicObstacles::dynamic_recfg_ [private] |
Dynamic reconfigure server to allow config
Definition at line 188 of file costmap_to_dynamic_obstacles.h.
Definition at line 182 of file costmap_to_dynamic_obstacles.h.
cv::Mat costmap_converter::CostmapToDynamicObstacles::fg_mask_ [private] |
Definition at line 176 of file costmap_to_dynamic_obstacles.h.
std::vector<cv::KeyPoint> costmap_converter::CostmapToDynamicObstacles::keypoints_ [private] |
Definition at line 179 of file costmap_to_dynamic_obstacles.h.
boost::mutex costmap_converter::CostmapToDynamicObstacles::mutex_ [private] |
Definition at line 172 of file costmap_to_dynamic_obstacles.h.
Definition at line 175 of file costmap_to_dynamic_obstacles.h.
Definition at line 181 of file costmap_to_dynamic_obstacles.h.
std::string costmap_converter::CostmapToDynamicObstacles::odom_topic_ = "/odom" [private] |
Definition at line 184 of file costmap_to_dynamic_obstacles.h.
bool costmap_converter::CostmapToDynamicObstacles::publish_static_obstacles_ = true [private] |
Definition at line 185 of file costmap_to_dynamic_obstacles.h.
std::unique_ptr<CTracker> costmap_converter::CostmapToDynamicObstacles::tracker_ [private] |
Definition at line 180 of file costmap_to_dynamic_obstacles.h.
The documentation for this class was generated from the following files: