#include <vector>#include <string>#include <limits>#include <sstream>#include <ros/ros.h>#include <boost/shared_ptr.hpp>#include <boost/pointer_cast.hpp>#include <kdl/chainjnttojacsolver.hpp>#include <kdl/jntarray.hpp>#include <eigen_conversions/eigen_kdl.h>#include "cob_twist_controller/constraints/constraint.h"#include "cob_twist_controller/constraints/constraint_params.h"#include "cob_twist_controller/damping_methods/damping.h"#include "cob_twist_controller/inverse_jacobian_calculations/inverse_jacobian_calculation.h"
Include dependency graph for constraint_ca_impl.h:

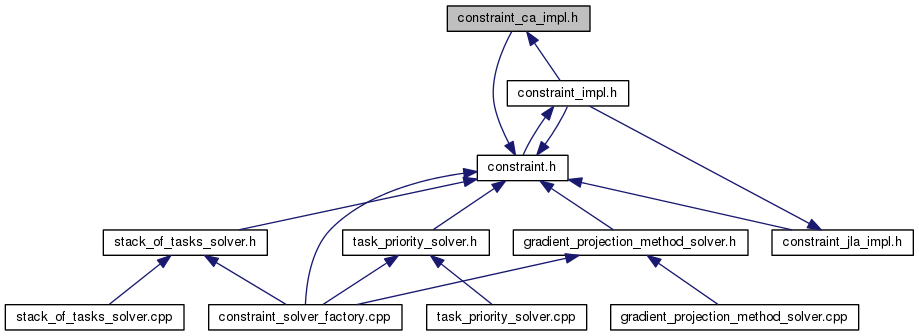
This graph shows which files directly or indirectly include this file: