#include <grid_2d.h>
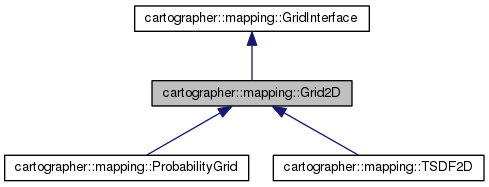
Inheritance diagram for cartographer::mapping::Grid2D:
Public Member Functions | |
| virtual std::unique_ptr< Grid2D > | ComputeCroppedGrid () const =0 |
| void | ComputeCroppedLimits (Eigen::Array2i *const offset, CellLimits *const limits) const |
| virtual bool | DrawToSubmapTexture (proto::SubmapQuery::Response::SubmapTexture *const texture, transform::Rigid3d local_pose) const =0 |
| void | FinishUpdate () |
| float | GetCorrespondenceCost (const Eigen::Array2i &cell_index) const |
| virtual GridType | GetGridType () const =0 |
| float | GetMaxCorrespondenceCost () const |
| float | GetMinCorrespondenceCost () const |
| Grid2D (const MapLimits &limits, float min_correspondence_cost, float max_correspondence_cost, ValueConversionTables *conversion_tables) | |
| Grid2D (const proto::Grid2D &proto, ValueConversionTables *conversion_tables) | |
| virtual void | GrowLimits (const Eigen::Vector2f &point) |
| bool | IsKnown (const Eigen::Array2i &cell_index) const |
| const MapLimits & | limits () const |
| virtual proto::Grid2D | ToProto () const |
Protected Member Functions | |
| const std::vector< uint16 > & | correspondence_cost_cells () const |
| void | GrowLimits (const Eigen::Vector2f &point, const std::vector< std::vector< uint16 > * > &grids, const std::vector< uint16 > &grids_unknown_cell_values) |
| const Eigen::AlignedBox2i & | known_cells_box () const |
| std::vector< uint16 > * | mutable_correspondence_cost_cells () |
| Eigen::AlignedBox2i * | mutable_known_cells_box () |
| std::vector< int > * | mutable_update_indices () |
| int | ToFlatIndex (const Eigen::Array2i &cell_index) const |
| const std::vector< int > & | update_indices () const |
Private Attributes | |
| std::vector< uint16 > | correspondence_cost_cells_ |
| Eigen::AlignedBox2i | known_cells_box_ |
| MapLimits | limits_ |
| float | max_correspondence_cost_ |
| float | min_correspondence_cost_ |
| std::vector< int > | update_indices_ |
| const std::vector< float > * | value_to_correspondence_cost_table_ |
Detailed Description
Constructor & Destructor Documentation
| cartographer::mapping::Grid2D::Grid2D | ( | const MapLimits & | limits, |
| float | min_correspondence_cost, | ||
| float | max_correspondence_cost, | ||
| ValueConversionTables * | conversion_tables | ||
| ) |
Definition at line 60 of file grid_2d.cc.
| cartographer::mapping::Grid2D::Grid2D | ( | const proto::Grid2D & | proto, |
| ValueConversionTables * | conversion_tables | ||
| ) | [explicit] |
Definition at line 75 of file grid_2d.cc.
Member Function Documentation
| virtual std::unique_ptr<Grid2D> cartographer::mapping::Grid2D::ComputeCroppedGrid | ( | ) | const [pure virtual] |
Implemented in cartographer::mapping::ProbabilityGrid, and cartographer::mapping::TSDF2D.
| void cartographer::mapping::Grid2D::ComputeCroppedLimits | ( | Eigen::Array2i *const | offset, |
| CellLimits *const | limits | ||
| ) | const |
Definition at line 110 of file grid_2d.cc.
| const std::vector<uint16>& cartographer::mapping::Grid2D::correspondence_cost_cells | ( | ) | const [inline, protected] |
| virtual bool cartographer::mapping::Grid2D::DrawToSubmapTexture | ( | proto::SubmapQuery::Response::SubmapTexture *const | texture, |
| transform::Rigid3d | local_pose | ||
| ) | const [pure virtual] |
Implemented in cartographer::mapping::ProbabilityGrid, and cartographer::mapping::TSDF2D.
Definition at line 99 of file grid_2d.cc.
| float cartographer::mapping::Grid2D::GetCorrespondenceCost | ( | const Eigen::Array2i & | cell_index | ) | const [inline] |
| virtual GridType cartographer::mapping::Grid2D::GetGridType | ( | ) | const [pure virtual] |
Implemented in cartographer::mapping::ProbabilityGrid, and cartographer::mapping::TSDF2D.
| float cartographer::mapping::Grid2D::GetMaxCorrespondenceCost | ( | ) | const [inline] |
| float cartographer::mapping::Grid2D::GetMinCorrespondenceCost | ( | ) | const [inline] |
| void cartographer::mapping::Grid2D::GrowLimits | ( | const Eigen::Vector2f & | point | ) | [virtual] |
Reimplemented in cartographer::mapping::TSDF2D.
Definition at line 125 of file grid_2d.cc.
| void cartographer::mapping::Grid2D::GrowLimits | ( | const Eigen::Vector2f & | point, |
| const std::vector< std::vector< uint16 > * > & | grids, | ||
| const std::vector< uint16 > & | grids_unknown_cell_values | ||
| ) | [protected] |
Definition at line 130 of file grid_2d.cc.
| bool cartographer::mapping::Grid2D::IsKnown | ( | const Eigen::Array2i & | cell_index | ) | const [inline] |
| const Eigen::AlignedBox2i& cartographer::mapping::Grid2D::known_cells_box | ( | ) | const [inline, protected] |
| const MapLimits& cartographer::mapping::Grid2D::limits | ( | ) | const [inline] |
| std::vector<uint16>* cartographer::mapping::Grid2D::mutable_correspondence_cost_cells | ( | ) | [inline, protected] |
| Eigen::AlignedBox2i* cartographer::mapping::Grid2D::mutable_known_cells_box | ( | ) | [inline, protected] |
| std::vector<int>* cartographer::mapping::Grid2D::mutable_update_indices | ( | ) | [inline, protected] |
| int cartographer::mapping::Grid2D::ToFlatIndex | ( | const Eigen::Array2i & | cell_index | ) | const [inline, protected] |
| proto::Grid2D cartographer::mapping::Grid2D::ToProto | ( | ) | const [virtual] |
Reimplemented in cartographer::mapping::ProbabilityGrid, and cartographer::mapping::TSDF2D.
Definition at line 166 of file grid_2d.cc.
| const std::vector<int>& cartographer::mapping::Grid2D::update_indices | ( | ) | const [inline, protected] |
Member Data Documentation
std::vector<uint16> cartographer::mapping::Grid2D::correspondence_cost_cells_ [private] |
Eigen::AlignedBox2i cartographer::mapping::Grid2D::known_cells_box_ [private] |
float cartographer::mapping::Grid2D::max_correspondence_cost_ [private] |
float cartographer::mapping::Grid2D::min_correspondence_cost_ [private] |
std::vector<int> cartographer::mapping::Grid2D::update_indices_ [private] |
const std::vector<float>* cartographer::mapping::Grid2D::value_to_correspondence_cost_table_ [private] |
The documentation for this class was generated from the following files: