This tutorial explains how to optimize over dynamic systems which have at discrete points jumps in the states or changes of the dynamic equations. As an guiding example to explain the concept we consider a simple model of a toy jojo. The interesting point about this jojo is that after the un-roll phase, when the end of the rope is reached, the kinetic energy is suddenly absorbed by the non-elastic rope while the rotational energy is preserved allowing the jojo to coil up again in an opposite direction. This discrete event leads to a "jump" of the velocity. The aim of this tutorial is to explain how a model with such a "jump" can be formulated in a mathematical way and how to setup and solve an associated optimal control problem with ACADO Toolkit. In the last part we also explain how to solve general optimization problems for hybrid models.
Mathematical Formulation of Dynamic Multi-Stage Optimization Problems
Let us define multiple stage intervals  and
and  for all
for all  and
and ![$ T_n := [t_{k-1}, t_k] $](form_39.png) , where we denote with
, where we denote with  the number of of stages. Here we assume
the number of of stages. Here we assume  . A general multi-stage optimization problem has the following form:
. A general multi-stage optimization problem has the following form:
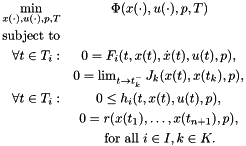
where we use the index set notation I := { 1, ..., n }. Here, the functions Fi are the model functions, while the functions Ji denote the transition- (or jump-) functions. The function hi denote the constraints associated with the stages, while the function r is a general multi-stage boundary constraint. Note that x denotes the state vector while u and p are the controls and parameters as usual for optimal control problems. The vector T contains the time points t1, t2, ... , tn+1 , which might be optimized, too.
Remarks:
- If the models are standard ODE's which do not contain any algebraic states the model functions Fi have the typically the form
![\[ 0 = F_i(t, x(t), \dot{x}(t), u(t), p) = \dot{x}(t) - f_i(t, x(t), u(t), p). \]](form_43.png)
- Analogously, if x does not contain algebraic states, the jump functions Ji can often be written in an explicit form
![\[ 0 = J_k(x(t), x(t_k), p) = x(t_k) - j_i(x(t), p). \]](form_44.png)
A Guiding Example: Optimal Control of a Jojo
As an example for a multi-stage optimization problem, we consider a simple jojo. Here, the altitute of the jojo is denoted by the state variable y, while v = dy/dt is the associated velocity. The hand playing with the jojo is described by the altitude x, while w = dx/dt is the velocity of the hand. The distance l between hand and jojo is defined as l := x - y. As soon as the jojo is released from the hand, the equations of motion are given by
![\[ f_1, f_2: \quad \left( \begin{array}{c} \dot{x}(t) \\ \dot{v}(t) \\ \dot{y}(t) \\ \dot{w}(t) \end{array} \right) = \left( \begin{array}{c} v(t)\\ u(t) \\ w(t)\\ -\mu g + ku + a(w-v) \end{array} \right) \]](form_45.png)
Here, we define the jojo's damping ratio  as well as the effective mass ratio μ := 1 - k, which depend on the inertia J, the mass m and the (inner) coiling radius r of the jojo. Moreover, g denotes the acceleration due to gravity while a is the jojo's coiling friction. Note that we assume here that the hand can directly be controlled by the input function u.
as well as the effective mass ratio μ := 1 - k, which depend on the inertia J, the mass m and the (inner) coiling radius r of the jojo. Moreover, g denotes the acceleration due to gravity while a is the jojo's coiling friction. Note that we assume here that the hand can directly be controlled by the input function u.
Let us assume that the sum of r and the total length of the rope is given by L. When the distance l = x - y happens to be equal to this length L, the kinetic energy of the jojo is suddenly absorbed, while for the rotational energy a conservation law is satisfied. Thus, the jump is given by
![\[ j_1: \quad \left( \begin{array}{c} \dot{x_1}(t) \\ \dot{v_1}(t) \\ \dot{y_1}(t) \\ \dot{w_1}(t) \end{array} \right) = \lim_{t\rightarrow t_1^-} \left( \begin{array}{c} x(t)\\ v(t) \\ y(t)\\ kv(t) + \sqrt(k^2v(t)^2 + k(w(t)^2 - 2v(t)w(t))) \end{array} \right). \]](form_47.png)
In order to understand this expression, it is helpful to remark that for the passive case v = 0 (i.e. for the case that the hand is at rest during the jump) the jump condition simplifies to
![\[ w(t_1) = - \lim_{t \rightarrow t^-_1} \sqrt(k ) w(t), \]](form_48.png)
i.e. the damping ratio k measures the loss of kinetic energy for a passive jump. After the jump, the equations of motion are again given by the above dynamic system, i.e. we have f1 = f2 in our example.
Now, our aim is to minimize the control action of the hand defined as
![\[ \Phi := \int_0^{t_2} u(t)^2 \textrm{d}t \]](form_49.png)
while starting and stopping the jojo under the following conditions:
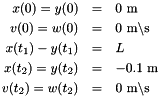
I.e. we start both the hand and the jojo at rest at the position 0. Moreover at the time t1 we require that the length of the rope is equal to L = 1m . Finally, the jojo should be stopped when softly touching the hand -10cm below the starting point. Note that the durations of the two phases, represented by the time variables t1 and t2 , are optimized, too.
Implementation of Multi Stage Optimal Control Problems with ACADO Toolkit
The following piece of code shows how to implement the above optimal control problem for the jojo model. In addition, a Gnuplot window is constructed, such that the results can automatically be visualized:
#include <acado_optimal_control.hpp> #include <include/acado_gnuplot/gnuplot_window.hpp> int main( ) { USING_NAMESPACE_ACADO // THE VARIABLES OF THE JOJO: // -------------------------- DifferentialState x; // the position of the "hand" DifferentialState v; // the velocity of the "hand" DifferentialState y; // the position of the jojo DifferentialState w; // the velocity of the jojo Control u; // the control action of the "hand" Parameter T1; // the duration of phase I Parameter T2; // the duration of phase II // THE GIVEN JOJO PARAMETERS: // -------------------------- const double m = 0.200; // the mass of the jojo (200g) const double J = 1e-4 ; // the inertia of the jojo (1e-4kg*m^2) const double r = 0.010; // the coiling radius of the jojo (1cm) const double g = 9.81 ; // the gravitational constant (9.81m/s^2) const double a = 1e-2 ; // the coiling friction (1e-2/s) const double L = 1.00 ; // the length of the rope (1m) // OTHER USEFUL CONSTANTS: // --------------------------- const double k = J/(m*r*r+J); // the jojo's damping ratio const double mu = 1.0 - k ; // the effective mass ratio // THE MODEL EQUATIONS FOR PHASE I: // ----------------------------------- DifferentialEquation f1( 0.0, T1 ); f1 << dot(x) == v ; f1 << dot(v) == u ; f1 << dot(y) == w ; f1 << dot(w) == -mu*g + k*u + a*(v-w); // THE EQUATIONS FOR THE JUMP: // --------------------------- Transition j; IntermediateState z; z = k*v; j << x == x ; j << v == v ; j << y == y ; j << w == z + sqrt( z*z + k*(w*w-2.0*w*v) ); // THE MODEL EQUATIONS FOR PHASE II: // ----------------------------------- DifferentialEquation f2( T1, T2 ); f2 << dot(x) == v ; f2 << dot(v) == u ; f2 << dot(y) == w ; f2 << dot(w) == -mu*g + k*u + a*(v-w); // DEFINE AN OPTIMAL CONTROL PROBLEM: // ---------------------------------- OCP ocp; ocp.minimizeLagrangeTerm( u*u ); ocp.subjectTo( f1, 20 ); ocp.subjectTo( j ); ocp.subjectTo( f2, 20 ); ocp.subjectTo( AT_START , x == 0.00 ); ocp.subjectTo( AT_START , v == 0.00 ); ocp.subjectTo( AT_START , y == 0.00 ); ocp.subjectTo( AT_START , w == 0.00 ); ocp.subjectTo( AT_TRANSITION, x-y == L ); ocp.subjectTo( AT_END , x == -0.10 ); ocp.subjectTo( AT_END , v == 0.00 ); ocp.subjectTo( AT_END , x-y == 0.00 ); ocp.subjectTo( AT_END , w == 0.00 ); ocp.subjectTo( 0.0 <= T1 <= 2.0 ); ocp.subjectTo( 0.0 <= T2 <= 4.0 ); // SETUP A GNUPLOT WINDOW TO DISPLAY THE RESULTS: // --------------------------------------------------- GnuplotWindow window; window.addSubplot( x, "POSITION OF THE HAND: x " ); window.addSubplot( v, "VELOCITY OF THE HAND: v " ); window.addSubplot( y, "POSITION OF THE JOJO: y " ); window.addSubplot( w, "VELOCITY OF THE JOJO: w " ); window.addSubplot( u, "THE CONTROL INPUT : u " ); // DEFINE AN OPTIMIZATION ALGORITHM AND SOLVE THE OCP: // --------------------------------------------------- OptimizationAlgorithm algorithm(ocp); algorithm << window; algorithm.solve(); return 0; }
If we run the above piece of code in ACADO, the corresponding Gnuplot output should be as follows:
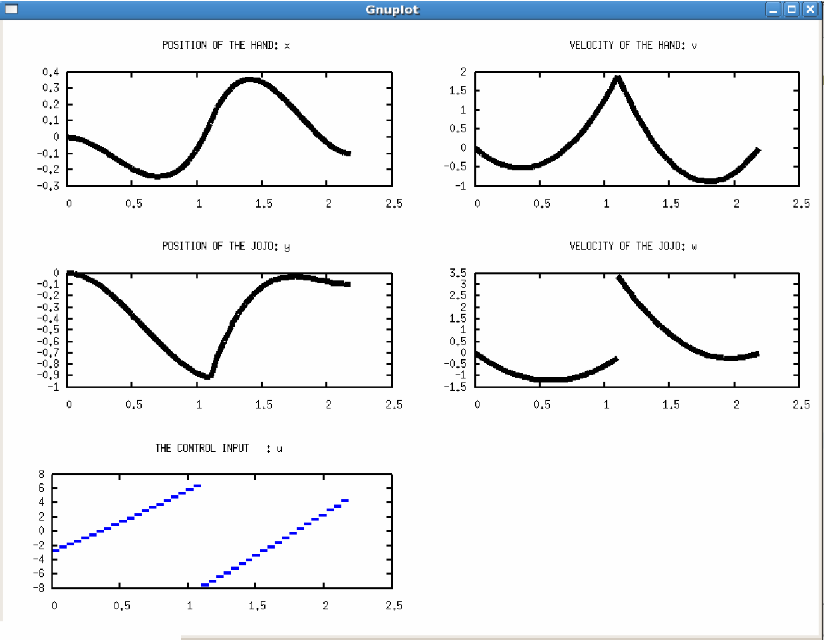
Note that the velocity of the hand has a peek at the time, where the jump is. The velocity of the jojo is discontinous at this time. One interpretation of this result is that the energy loss during the jump can be reduced by moving the hand quickly upwards during this phase.
Next example: Optimization of Differential Algebraic Systems (DAEs)