Base class for interfacing online feedback laws to be used within a Controller. More...
#include <control_law.hpp>
Detailed Description
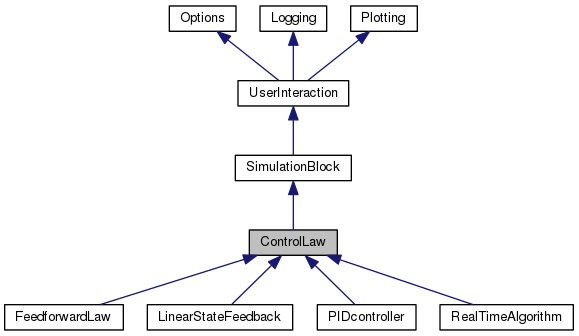
Base class for interfacing online feedback laws to be used within a Controller.
The class ControlLaw serves as a base class for interfacing online control laws to be used within a Controller. Most prominently, the control law can be a RealTimeAlgorithm solving dynamic optimization problems. But also classical feedback laws like LQR or PID controller or feedforward laws can be interfaced.
After initialization, the ControlLaw is evaluated with a given fixed sampling time by calling the step-routines. Additionally, the steps can be divided into a preparation step and a feedback step that actually computes the feedback. This feature has mainly been added to deal with RealTimeAlgorithm can make use of this division in order to reduce the feedback delay.
Definition at line 64 of file control_law.hpp.
Constructor & Destructor Documentation
Default constructor.
Definition at line 45 of file control_law.cpp.
| ControlLaw::ControlLaw | ( | double | _samplingTime | ) |
Constructor which takes the sampling time.
- Parameters:
-
[in] _samplingTime Sampling time.
Definition at line 50 of file control_law.cpp.
| ControlLaw::ControlLaw | ( | const ControlLaw & | rhs | ) |
Copy constructor (deep copy).
- Parameters:
-
[in] rhs Right-hand side object.
Definition at line 56 of file control_law.cpp.
| ControlLaw::~ControlLaw | ( | ) | [virtual] |
Destructor.
Definition at line 63 of file control_law.cpp.
Member Function Documentation
| virtual ControlLaw* ControlLaw::clone | ( | ) | const [pure virtual] |
Clone constructor (deep copy).
- Returns:
- Pointer to deep copy of base class type
Implemented in PIDcontroller, FeedforwardLaw, LinearStateFeedback, and RealTimeAlgorithm.
| returnValue ControlLaw::feedbackStep | ( | double | currentTime, |
| const DVector & | _x, | ||
| const DVector & | _p = emptyConstVector, |
||
| const VariablesGrid & | _yRef = emptyConstVariablesGrid |
||
| ) | [virtual] |
Performs next feedback step of the control law based on given inputs.
- Parameters:
-
[in] currentTime Current time. [in] _x Most recent value for differential states. [in] _p Most recent value for parameters. [in] _yRef Current piece of reference trajectory (if not specified during previous preparationStep).
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_VECTOR_DIMENSION_MISMATCH,
RET_CONTROLLAW_STEP_FAILED
Definition at line 119 of file control_law.cpp.
| double ControlLaw::getLengthControlHorizon | ( | ) | const [virtual] |
Returns length of the control horizon (for the case a predictive control law is used).
- Returns:
- Length of the control horizon
Reimplemented in RealTimeAlgorithm.
Definition at line 190 of file control_law.cpp.
| double ControlLaw::getLengthPredictionHorizon | ( | ) | const [virtual] |
Returns length of the prediction horizon (for the case a predictive control law is used).
- Returns:
- Length of the prediction horizon
Reimplemented in RealTimeAlgorithm.
Definition at line 184 of file control_law.cpp.
| uint ControlLaw::getNP | ( | ) | const [virtual] |
Returns number of parameters.
- Returns:
- Number of parameters
Reimplemented in RealTimeAlgorithm, PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
Definition at line 166 of file control_law.cpp.
| uint ControlLaw::getNU | ( | ) | const [virtual] |
Returns number of controls.
- Returns:
- Number of controls
Reimplemented in RealTimeAlgorithm, PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
Definition at line 160 of file control_law.cpp.
| uint ControlLaw::getNW | ( | ) | const [virtual] |
Returns number of (estimated) disturbances.
- Returns:
- Number of (estimated) disturbances
Reimplemented in RealTimeAlgorithm, PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
Definition at line 172 of file control_law.cpp.
| uint ControlLaw::getNX | ( | ) | const [virtual] |
Returns number of (estimated) differential states.
- Returns:
- Number of (estimated) differential states
Reimplemented in RealTimeAlgorithm, PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
Definition at line 148 of file control_law.cpp.
| uint ControlLaw::getNXA | ( | ) | const [virtual] |
Returns number of (estimated) algebraic states.
- Returns:
- Number of (estimated) algebraic states
Reimplemented in RealTimeAlgorithm, PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
Definition at line 154 of file control_law.cpp.
| uint ControlLaw::getNY | ( | ) | const [virtual] |
Returns number of process outputs.
- Returns:
- Number of process outputs
Reimplemented in RealTimeAlgorithm, PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
Definition at line 178 of file control_law.cpp.
| returnValue ControlLaw::getP | ( | DVector & | _p | ) | const [inline] |
Returns parameter signal as determined by the control law.
- Parameters:
-
[out] _p Parameter signal as determined by the control law.
- Returns:
- SUCCESSFUL_RETURN
| returnValue ControlLaw::getU | ( | DVector & | _u | ) | const [inline] |
Returns control signal as determined by the control law.
- Parameters:
-
[out] _u Control signal as determined by the control law.
- Returns:
- SUCCESSFUL_RETURN
| virtual returnValue ControlLaw::init | ( | double | startTime = 0.0, |
| const DVector & | _x = emptyConstVector, |
||
| const DVector & | _p = emptyConstVector, |
||
| const VariablesGrid & | _yRef = emptyConstVariablesGrid |
||
| ) | [pure virtual] |
Initializes the control law with given start values and performs a number of consistency checks.
- Parameters:
-
[in] _startTime Start time. [in] _x Initial value for differential states. [in] _p Initial value for parameters. [in] _yRef Initial value for reference trajectory.
- Returns:
- SUCCESSFUL_RETURN,
RET_CONTROLLAW_INIT_FAILED
Implemented in PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
| returnValue ControlLaw::initializeAlgebraicStates | ( | const VariablesGrid & | _xa_init | ) | [virtual] |
Initializes algebraic states of the control law.
- Parameters:
-
[in] _xa_init Initial value for algebraic states.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented in RealTimeAlgorithm.
Definition at line 83 of file control_law.cpp.
| returnValue ControlLaw::initializeAlgebraicStates | ( | const char * | fileName | ) | [virtual] |
Initializes algebraic states of the control law from data file.
- Parameters:
-
[in] fileName Name of file containing initial value for algebraic states.
- Returns:
- SUCCESSFUL_RETURN,
RET_FILE_CAN_NOT_BE_OPENED
Reimplemented in RealTimeAlgorithm.
Definition at line 89 of file control_law.cpp.
| returnValue ControlLaw::initializeControls | ( | const VariablesGrid & | _u_init | ) | [virtual] |
Initializes controls of the control law.
- Parameters:
-
[in] _u_init Initial value for controls.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented in RealTimeAlgorithm.
Definition at line 96 of file control_law.cpp.
| returnValue ControlLaw::initializeControls | ( | const char * | fileName | ) | [virtual] |
Initializes controls of the control law from data file.
- Parameters:
-
[in] fileName Name of file containing initial value for controls.
- Returns:
- SUCCESSFUL_RETURN,
RET_FILE_CAN_NOT_BE_OPENED
Reimplemented in RealTimeAlgorithm.
Definition at line 102 of file control_law.cpp.
| virtual BooleanType ControlLaw::isDynamic | ( | ) | const [pure virtual] |
Returns whether the control law is based on dynamic optimization or a static one.
- Returns:
- BT_TRUE iff control law is based on dynamic optimization,
BT_FALSE otherwise
Implemented in RealTimeAlgorithm, PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
| BooleanType ControlLaw::isInRealTimeMode | ( | ) | const [virtual] |
Returns whether the control law is working in real-time mode.
- Returns:
- BT_TRUE iff control law is working in real-time mode,
BT_FALSE otherwise
Reimplemented in RealTimeAlgorithm.
Definition at line 200 of file control_law.cpp.
| virtual BooleanType ControlLaw::isStatic | ( | ) | const [pure virtual] |
Returns whether the control law is a static one or based on dynamic optimization.
- Returns:
- BT_TRUE iff control law is a static one,
BT_FALSE otherwise
Implemented in RealTimeAlgorithm, PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
| ControlLaw & ControlLaw::operator= | ( | const ControlLaw & | rhs | ) |
Assignment operator (deep copy).
- Parameters:
-
[in] rhs Right-hand side object.
Definition at line 68 of file control_law.cpp.
| returnValue ControlLaw::preparationStep | ( | double | nextTime = 0.0, |
| const VariablesGrid & | _yRef = emptyConstVariablesGrid |
||
| ) | [virtual] |
Performs next preparation step of the control law based on given inputs.
- Parameters:
-
[in] nextTime Time at next step. [in] _yRef Piece of reference trajectory for next step (required for hotstarting).
- Returns:
- SUCCESSFUL_RETURN
Reimplemented in RealTimeAlgorithm.
Definition at line 130 of file control_law.cpp.
| returnValue ControlLaw::shift | ( | double | timeShift = -1.0 | ) | [virtual] |
Shifts the data for preparating the next real-time step.
- Returns:
- RET_NOT_YET_IMPLEMENTED
Reimplemented in RealTimeAlgorithm.
Definition at line 140 of file control_law.cpp.
| virtual returnValue ControlLaw::step | ( | double | currentTime, |
| const DVector & | _x, | ||
| const DVector & | _p = emptyConstVector, |
||
| const VariablesGrid & | _yRef = emptyConstVariablesGrid |
||
| ) | [pure virtual] |
Performs next step of the control law based on given inputs.
- Parameters:
-
[in] currentTime Current time. [in] _x Most recent value for differential states. [in] _p Most recent value for parameters. [in] _yRef Current piece of reference trajectory or piece of reference trajectory for next step (required for hotstarting).
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_VECTOR_DIMENSION_MISMATCH,
RET_CONTROLLAW_STEP_FAILED
Implemented in PIDcontroller, FeedforwardLaw, and LinearStateFeedback.
| returnValue ControlLaw::step | ( | const DVector & | _x, |
| const DVector & | _p = emptyConstVector, |
||
| const VariablesGrid & | _yRef = emptyConstVariablesGrid |
||
| ) | [virtual] |
Performs next step of the control law based on given inputs.
- Parameters:
-
[in] _x Most recent value for differential states. [in] _p Most recent value for parameters. [in] _yRef Current piece of reference trajectory or piece of reference trajectory for next step (required for hotstarting).
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_VECTOR_DIMENSION_MISMATCH,
RET_CONTROLLAW_STEP_FAILED
Definition at line 110 of file control_law.cpp.
Member Data Documentation
DVector ControlLaw::p [protected] |
Time-constant parameter signals as determined by the control law.
Definition at line 342 of file control_law.hpp.
DVector ControlLaw::u [protected] |
First piece of time-varying control signals as determined by the control law.
Definition at line 341 of file control_law.hpp.
The documentation for this class was generated from the following files: