Octree pointcloud voxel class used for adjacency calculation More...
#include <octree_pointcloud_adjacency.h>
Public Types | |
| typedef OctreePointCloudT::BranchNode | BranchNode |
| typedef pcl::PointCloud< PointT > | CloudT |
| typedef LeafVectorT::const_iterator | const_iterator |
| typedef const OctreeDepthFirstIterator < OctreeAdjacencyT > | ConstIterator |
| typedef const OctreeLeafNodeIterator < OctreeAdjacencyT > | ConstLeafNodeIterator |
| typedef boost::shared_ptr < const OctreeAdjacencyT > | ConstPtr |
| typedef VoxelAdjacencyList::edge_descriptor | EdgeID |
| typedef OctreeDepthFirstIterator < OctreeAdjacencyT > | Iterator |
| typedef LeafVectorT::iterator | iterator |
| typedef OctreePointCloudT::LeafNode | LeafNode |
| typedef OctreeLeafNodeIterator < OctreeAdjacencyT > | LeafNodeIterator |
| typedef std::vector < LeafContainerT * > | LeafVectorT |
| typedef OctreePointCloudAdjacency < PointT, LeafContainerT, BranchContainerT > | OctreeAdjacencyT |
| typedef OctreeBase < LeafContainerT, BranchContainerT > | OctreeBaseT |
| typedef OctreePointCloud < PointT, LeafContainerT, BranchContainerT, OctreeBaseT > | OctreePointCloudT |
| typedef boost::shared_ptr < OctreeAdjacencyT > | Ptr |
| typedef boost::adjacency_list < boost::setS, boost::setS, boost::undirectedS, PointT, float > | VoxelAdjacencyList |
| typedef VoxelAdjacencyList::vertex_descriptor | VoxelID |
Public Member Functions | |
| void | addPointsFromInputCloud () |
| Adds points from cloud to the octree. | |
| iterator | begin () |
| void | computeVoxelAdjacencyGraph (VoxelAdjacencyList &voxel_adjacency_graph) |
| Computes an adjacency graph of voxel relations. | |
| Iterator | depth_begin (unsigned int maxDepth_arg=0) |
| const Iterator | depth_end () |
| iterator | end () |
| LeafContainerT * | getLeafContainerAtPoint (const PointT &point_arg) const |
| Gets the leaf container for a given point. | |
| LeafNodeIterator | leaf_begin (unsigned int maxDepth_arg=0) |
| const LeafNodeIterator | leaf_end () |
| OctreePointCloudAdjacency (const double resolution_arg) | |
| Constructor. | |
| void | setTransformFunction (boost::function< void(PointT &p)> transform_func) |
| Sets a point transform (and inverse) used to transform the space of the input cloud This is useful for changing how adjacency is calculated - such as relaxing the adjacency criterion for points further from the camera. | |
| size_t | size () const |
| bool | testForOcclusion (const PointT &point_arg, const PointXYZ &camera_pos=PointXYZ(0, 0, 0)) |
| Tests whether input point is occluded from specified camera point by other voxels. | |
| virtual | ~OctreePointCloudAdjacency () |
| Empty class destructor. | |
Protected Member Functions | |
| virtual void | addPointIdx (const int pointIdx_arg) |
| Add point at index from input pointcloud dataset to octree. | |
| void | computeNeighbors (OctreeKey &key_arg, LeafContainerT *leaf_container) |
| Fills in the neighbors fields for new voxels. | |
| void | genOctreeKeyforPoint (const PointT &point_arg, OctreeKey &key_arg) const |
| Generates octree key for specified point (uses transform if provided) | |
Private Attributes | |
| LeafVectorT | leaf_vector_ |
| StopWatch | timer_ |
| boost::function< void(PointT &p)> | transform_func_ |
Friends | |
| class | OctreeBreadthFirstIterator< OctreeAdjacencyT > |
| class | OctreeDepthFirstIterator< OctreeAdjacencyT > |
| class | OctreeIteratorBase< OctreeAdjacencyT > |
| class | OctreeLeafNodeIterator< OctreeAdjacencyT > |
Detailed Description
template<typename PointT, typename LeafContainerT = OctreePointCloudAdjacencyContainer <PointT>, typename BranchContainerT = OctreeContainerEmpty>
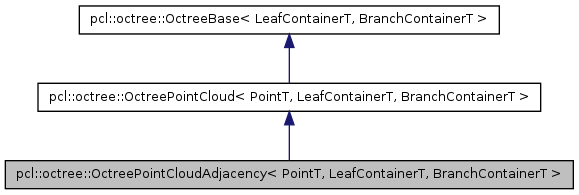
class pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >
Octree pointcloud voxel class used for adjacency calculation
- Note:
- This pointcloud octree class generate an octree from a point cloud (zero-copy).
- The octree pointcloud is initialized with its voxel resolution. Its bounding box is automatically adjusted or can be predefined.
- This class maintains adjacency information for its voxels
- The OctreePointCloudAdjacencyContainer can be used to store data in leaf nodes
- An optional transform function can be provided which changes how the voxel grid is computed - this can be used to, for example, make voxel bins larger as they increase in distance from the origin (camera)
- See SupervoxelClustering for an example of how to provide a transform function
- If used in academic work, please cite:
- J. Papon, A. Abramov, M. Schoeler, F. Woergoetter Voxel Cloud Connectivity Segmentation - Supervoxels from PointClouds In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2013
Definition at line 83 of file octree_pointcloud_adjacency.h.
Member Typedef Documentation
| typedef OctreePointCloudT::BranchNode pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::BranchNode |
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 96 of file octree_pointcloud_adjacency.h.
| typedef pcl::PointCloud<PointT> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::CloudT |
Definition at line 98 of file octree_pointcloud_adjacency.h.
| typedef LeafVectorT::const_iterator pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::const_iterator |
Definition at line 130 of file octree_pointcloud_adjacency.h.
| typedef const OctreeDepthFirstIterator<OctreeAdjacencyT> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::ConstIterator |
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 112 of file octree_pointcloud_adjacency.h.
| typedef const OctreeLeafNodeIterator< OctreeAdjacencyT> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::ConstLeafNodeIterator |
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 118 of file octree_pointcloud_adjacency.h.
| typedef boost::shared_ptr<const OctreeAdjacencyT> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::ConstPtr |
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 92 of file octree_pointcloud_adjacency.h.
| typedef VoxelAdjacencyList::edge_descriptor pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::EdgeID |
Definition at line 124 of file octree_pointcloud_adjacency.h.
| typedef OctreeDepthFirstIterator<OctreeAdjacencyT> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::Iterator |
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 111 of file octree_pointcloud_adjacency.h.
| typedef LeafVectorT::iterator pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::iterator |
Definition at line 129 of file octree_pointcloud_adjacency.h.
| typedef OctreePointCloudT::LeafNode pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::LeafNode |
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 95 of file octree_pointcloud_adjacency.h.
| typedef OctreeLeafNodeIterator<OctreeAdjacencyT> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::LeafNodeIterator |
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 114 of file octree_pointcloud_adjacency.h.
| typedef std::vector<LeafContainerT*> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::LeafVectorT |
Definition at line 127 of file octree_pointcloud_adjacency.h.
| typedef OctreePointCloudAdjacency<PointT, LeafContainerT, BranchContainerT > pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::OctreeAdjacencyT |
Definition at line 90 of file octree_pointcloud_adjacency.h.
| typedef OctreeBase<LeafContainerT, BranchContainerT> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::OctreeBaseT |
Definition at line 88 of file octree_pointcloud_adjacency.h.
| typedef OctreePointCloud<PointT, LeafContainerT, BranchContainerT,OctreeBaseT > pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::OctreePointCloudT |
Definition at line 94 of file octree_pointcloud_adjacency.h.
| typedef boost::shared_ptr<OctreeAdjacencyT> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::Ptr |
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 91 of file octree_pointcloud_adjacency.h.
| typedef boost::adjacency_list<boost::setS, boost::setS, boost::undirectedS, PointT, float> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::VoxelAdjacencyList |
Definition at line 120 of file octree_pointcloud_adjacency.h.
| typedef VoxelAdjacencyList::vertex_descriptor pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::VoxelID |
Definition at line 123 of file octree_pointcloud_adjacency.h.
Constructor & Destructor Documentation
| pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::OctreePointCloudAdjacency | ( | const double | resolution_arg | ) |
Constructor.
- Parameters:
-
[in] resolution_arg octree resolution at lowest octree level (voxel size)
Definition at line 45 of file octree_pointcloud_adjacency.hpp.
| virtual pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::~OctreePointCloudAdjacency | ( | ) | [inline, virtual] |
Empty class destructor.
Definition at line 144 of file octree_pointcloud_adjacency.h.
Member Function Documentation
| void pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::addPointIdx | ( | const int | pointIdx_arg | ) | [protected, virtual] |
Add point at index from input pointcloud dataset to octree.
- Parameters:
-
[in] pointIdx_arg the index representing the point in the dataset given by setInputCloud to be added
- Note:
- This virtual implementation allows the use of a transform function to compute keys
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 141 of file octree_pointcloud_adjacency.hpp.
| void pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::addPointsFromInputCloud | ( | ) |
Adds points from cloud to the octree.
- Note:
- This overrides the addPointsFromInputCloud from the OctreePointCloud class
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 54 of file octree_pointcloud_adjacency.hpp.
| iterator pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::begin | ( | ) | [inline] |
Definition at line 131 of file octree_pointcloud_adjacency.h.
| void pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::computeNeighbors | ( | OctreeKey & | key_arg, |
| LeafContainerT * | leaf_container | ||
| ) | [protected] |
Fills in the neighbors fields for new voxels.
- Parameters:
-
[in] key_arg Key of the voxel to check neighbors for [in] leaf_container Pointer to container of the leaf to check neighbors for
Definition at line 170 of file octree_pointcloud_adjacency.hpp.
| void pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::computeVoxelAdjacencyGraph | ( | VoxelAdjacencyList & | voxel_adjacency_graph | ) |
Computes an adjacency graph of voxel relations.
- Note:
- WARNING: This slows down rapidly as cloud size increases due number of edges
- Parameters:
-
[out] voxel_adjacency_graph Boost Graph Library Adjacency graph of the voxel touching relationships - vertices are pointT, edges represent touching, and edge lengths are the distance between the points
Definition at line 213 of file octree_pointcloud_adjacency.hpp.
| Iterator pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::depth_begin | ( | unsigned int | maxDepth_arg = 0 | ) | [inline] |
Reimplemented from pcl::octree::OctreeBase< LeafContainerT, BranchContainerT >.
Definition at line 113 of file octree_pointcloud_adjacency.h.
| const Iterator pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::depth_end | ( | ) | [inline] |
Reimplemented from pcl::octree::OctreeBase< LeafContainerT, BranchContainerT >.
Definition at line 114 of file octree_pointcloud_adjacency.h.
| iterator pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::end | ( | ) | [inline] |
Reimplemented from pcl::octree::OctreeBase< LeafContainerT, BranchContainerT >.
Definition at line 132 of file octree_pointcloud_adjacency.h.
| void pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::genOctreeKeyforPoint | ( | const PointT & | point_arg, |
| OctreeKey & | key_arg | ||
| ) | const [protected] |
Generates octree key for specified point (uses transform if provided)
- Parameters:
-
[in] point_arg Point to generate key for [out] key_arg Resulting octree key
Reimplemented from pcl::octree::OctreePointCloud< PointT, LeafContainerT, BranchContainerT >.
Definition at line 118 of file octree_pointcloud_adjacency.hpp.
| LeafContainerT * pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::getLeafContainerAtPoint | ( | const PointT & | point_arg | ) | const |
Gets the leaf container for a given point.
- Parameters:
-
[in] point_arg Point to search for
- Returns:
- Pointer to the leaf container - null if no leaf container found
Definition at line 198 of file octree_pointcloud_adjacency.hpp.
| LeafNodeIterator pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::leaf_begin | ( | unsigned int | maxDepth_arg = 0 | ) | [inline] |
Reimplemented from pcl::octree::OctreeBase< LeafContainerT, BranchContainerT >.
Definition at line 119 of file octree_pointcloud_adjacency.h.
| const LeafNodeIterator pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::leaf_end | ( | ) | [inline] |
Reimplemented from pcl::octree::OctreeBase< LeafContainerT, BranchContainerT >.
Definition at line 120 of file octree_pointcloud_adjacency.h.
| void pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::setTransformFunction | ( | boost::function< void(PointT &p)> | transform_func | ) | [inline] |
Sets a point transform (and inverse) used to transform the space of the input cloud This is useful for changing how adjacency is calculated - such as relaxing the adjacency criterion for points further from the camera.
- Parameters:
-
[in] transform_func A boost:function pointer to the transform to be used. The transform must have one parameter (a point) which it modifies in place
Definition at line 174 of file octree_pointcloud_adjacency.h.
| size_t pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::size | ( | ) | const [inline] |
Definition at line 134 of file octree_pointcloud_adjacency.h.
| bool pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::testForOcclusion | ( | const PointT & | point_arg, |
| const PointXYZ & | camera_pos = PointXYZ (0,0,0) |
||
| ) |
Tests whether input point is occluded from specified camera point by other voxels.
- Parameters:
-
[in] point_arg Point to test for [in] camera_pos Position of camera, defaults to origin
- Returns:
- True if path to camera is blocked by a voxel, false otherwise
Definition at line 260 of file octree_pointcloud_adjacency.hpp.
Friends And Related Function Documentation
friend class OctreeBreadthFirstIterator< OctreeAdjacencyT > [friend] |
Definition at line 107 of file octree_pointcloud_adjacency.h.
friend class OctreeDepthFirstIterator< OctreeAdjacencyT > [friend] |
Definition at line 106 of file octree_pointcloud_adjacency.h.
friend class OctreeIteratorBase< OctreeAdjacencyT > [friend] |
Definition at line 105 of file octree_pointcloud_adjacency.h.
friend class OctreeLeafNodeIterator< OctreeAdjacencyT > [friend] |
Definition at line 108 of file octree_pointcloud_adjacency.h.
Member Data Documentation
LeafVectorT pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::leaf_vector_ [private] |
Definition at line 215 of file octree_pointcloud_adjacency.h.
StopWatch pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::timer_ [private] |
Definition at line 212 of file octree_pointcloud_adjacency.h.
boost::function<void (PointT &p)> pcl::octree::OctreePointCloudAdjacency< PointT, LeafContainerT, BranchContainerT >::transform_func_ [private] |
Definition at line 217 of file octree_pointcloud_adjacency.h.
The documentation for this class was generated from the following files: