SurfaceReconstruction represents a base surface reconstruction class. All surface reconstruction methods take in a point cloud and generate a new surface from it, by either re-sampling the data or generating new data altogether. These methods are thus not preserving the topology of the original data. More...
#include <reconstruction.h>
Public Types | |
| typedef boost::shared_ptr < const SurfaceReconstruction < PointInT > > | ConstPtr |
| typedef boost::shared_ptr < SurfaceReconstruction < PointInT > > | Ptr |
Public Member Functions | |
| virtual void | reconstruct (pcl::PolygonMesh &output) |
| Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()> | |
| virtual void | reconstruct (pcl::PointCloud< PointInT > &points, std::vector< pcl::Vertices > &polygons) |
| Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()> | |
| SurfaceReconstruction () | |
| Constructor. | |
| virtual | ~SurfaceReconstruction () |
| Destructor. | |
Protected Member Functions | |
| virtual void | performReconstruction (pcl::PolygonMesh &output)=0 |
| Abstract surface reconstruction method. | |
| virtual void | performReconstruction (pcl::PointCloud< PointInT > &points, std::vector< pcl::Vertices > &polygons)=0 |
| Abstract surface reconstruction method. | |
Protected Attributes | |
| bool | check_tree_ |
| A flag specifying whether or not the derived reconstruction algorithm needs the search object tree. | |
Detailed Description
template<typename PointInT>
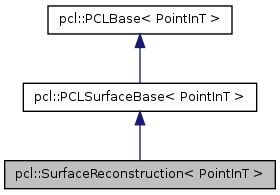
class pcl::SurfaceReconstruction< PointInT >
SurfaceReconstruction represents a base surface reconstruction class. All surface reconstruction methods take in a point cloud and generate a new surface from it, by either re-sampling the data or generating new data altogether. These methods are thus not preserving the topology of the original data.
- Note:
- Reconstruction methods that always preserve the original input point cloud data as the surface vertices and simply construct the mesh on top should inherit from MeshConstruction.
Definition at line 119 of file reconstruction.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const SurfaceReconstruction<PointInT> > pcl::SurfaceReconstruction< PointInT >::ConstPtr |
Reimplemented from pcl::PCLSurfaceBase< PointInT >.
Reimplemented in pcl::MarchingCubes< PointNT >, pcl::GridProjection< PointNT >, pcl::Poisson< PointNT >, pcl::MarchingCubesRBF< PointNT >, and pcl::MarchingCubesHoppe< PointNT >.
Definition at line 123 of file reconstruction.h.
| typedef boost::shared_ptr<SurfaceReconstruction<PointInT> > pcl::SurfaceReconstruction< PointInT >::Ptr |
Reimplemented from pcl::PCLSurfaceBase< PointInT >.
Reimplemented in pcl::MarchingCubes< PointNT >, pcl::GridProjection< PointNT >, pcl::Poisson< PointNT >, pcl::MarchingCubesRBF< PointNT >, and pcl::MarchingCubesHoppe< PointNT >.
Definition at line 122 of file reconstruction.h.
Constructor & Destructor Documentation
| pcl::SurfaceReconstruction< PointInT >::SurfaceReconstruction | ( | ) | [inline] |
Constructor.
Definition at line 133 of file reconstruction.h.
| virtual pcl::SurfaceReconstruction< PointInT >::~SurfaceReconstruction | ( | ) | [inline, virtual] |
Destructor.
Definition at line 136 of file reconstruction.h.
Member Function Documentation
| virtual void pcl::SurfaceReconstruction< PointInT >::performReconstruction | ( | pcl::PolygonMesh & | output | ) | [protected, pure virtual] |
Abstract surface reconstruction method.
- Parameters:
-
[out] output the output polygonal mesh
Implemented in pcl::MarchingCubes< PointNT >, pcl::GridProjection< PointNT >, and pcl::Poisson< PointNT >.
| virtual void pcl::SurfaceReconstruction< PointInT >::performReconstruction | ( | pcl::PointCloud< PointInT > & | points, |
| std::vector< pcl::Vertices > & | polygons | ||
| ) | [protected, pure virtual] |
Abstract surface reconstruction method.
- Parameters:
-
[out] points the resultant points lying on the surface [out] polygons the resultant polygons, as a set of vertices. The Vertices structure contains an array of point indices.
Implemented in pcl::MarchingCubes< PointNT >, pcl::GridProjection< PointNT >, and pcl::Poisson< PointNT >.
| void pcl::SurfaceReconstruction< PointInT >::reconstruct | ( | pcl::PolygonMesh & | output | ) | [virtual] |
Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()>
- Parameters:
-
[out] output the resultant reconstructed surface model
NOTE: passing in boost shared pointer with * as const& should be OK here
NOTE: usually the number of triangles is around twice the number of vertices
Implements pcl::PCLSurfaceBase< PointInT >.
Definition at line 46 of file reconstruction.hpp.
| void pcl::SurfaceReconstruction< PointInT >::reconstruct | ( | pcl::PointCloud< PointInT > & | points, |
| std::vector< pcl::Vertices > & | polygons | ||
| ) | [virtual] |
Base method for surface reconstruction for all points given in <setInputCloud (), setIndices ()>
- Parameters:
-
[out] points the resultant points lying on the new surface [out] polygons the resultant polygons, as a set of vertices. The Vertices structure contains an array of point indices.
NOTE: usually the number of triangles is around twice the number of vertices
Definition at line 86 of file reconstruction.hpp.
Member Data Documentation
bool pcl::SurfaceReconstruction< PointInT >::check_tree_ [protected] |
A flag specifying whether or not the derived reconstruction algorithm needs the search object tree.
Definition at line 158 of file reconstruction.h.
The documentation for this class was generated from the following files: