RSDEstimation estimates the Radius-based Surface Descriptor (minimal and maximal radius of the local surface's curves) for a given point cloud dataset containing points and normals. More...
#include <rsd.h>
Public Types | |
| typedef boost::shared_ptr < const RSDEstimation < PointInT, PointNT, PointOutT > > | ConstPtr |
| typedef Feature< PointInT, PointOutT >::PointCloudIn | PointCloudIn |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
| typedef boost::shared_ptr < RSDEstimation< PointInT, PointNT, PointOutT > > | Ptr |
Public Member Functions | |
| boost::shared_ptr< std::vector < Eigen::MatrixXf, Eigen::aligned_allocator < Eigen::MatrixXf > > > | getHistograms () const |
| Returns a pointer to the list of full distance-angle histograms for all points. | |
| int | getNrSubdivisions () const |
| Get the number of subdivisions for the considered distance interval. | |
| double | getPlaneRadius () const |
| Get the maximum radius, above which everything can be considered planar. | |
| bool | getSaveHistograms () const |
| Returns whether the full distance-angle histograms are being saved. | |
| RSDEstimation () | |
| Empty constructor. | |
| void | setKSearch (int) |
| Disables the setting of the number of k nearest neighbors to use for the feature estimation. | |
| void | setNrSubdivisions (int nr_subdiv) |
| Set the number of subdivisions for the considered distance interval. | |
| void | setPlaneRadius (double plane_radius) |
| Set the maximum radius, above which everything can be considered planar. | |
| void | setSaveHistograms (bool save) |
| Set whether the full distance-angle histograms should be saved. | |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate the estimates the Radius-based Surface Descriptor (RSD) at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
Protected Attributes | |
| boost::shared_ptr< std::vector < Eigen::MatrixXf, Eigen::aligned_allocator < Eigen::MatrixXf > > > | histograms_ |
| The list of full distance-angle histograms for all points. | |
Private Attributes | |
| int | nr_subdiv_ |
| The number of subdivisions for the considered distance interval. | |
| double | plane_radius_ |
| The maximum radius, above which everything can be considered planar. | |
| bool | save_histograms_ |
| Signals whether the full distance-angle histograms are being saved. | |
Detailed Description
template<typename PointInT, typename PointNT, typename PointOutT>
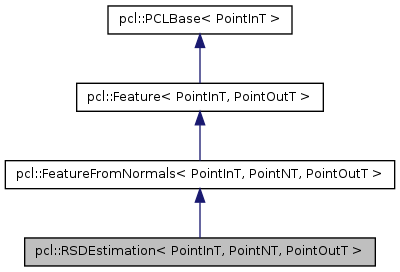
class pcl::RSDEstimation< PointInT, PointNT, PointOutT >
RSDEstimation estimates the Radius-based Surface Descriptor (minimal and maximal radius of the local surface's curves) for a given point cloud dataset containing points and normals.
- Note:
- If you use this code in any academic work, please cite:
- Z.C. Marton , D. Pangercic , N. Blodow , J. Kleinehellefort, M. Beetz General 3D Modelling of Novel Objects from a Single View In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Taipei, Taiwan, October 18-22, 2010
- Z.C. Marton, D. Pangercic, N. Blodow, Michael Beetz. Combined 2D-3D Categorization and Classification for Multimodal Perception Systems. In The International Journal of Robotics Research, Sage Publications pages 1378--1402, Volume 30, Number 11, September 2011.
- Note:
- The code is stateful as we do not expect this class to be multicore parallelized.
Member Typedef Documentation
| typedef boost::shared_ptr<const RSDEstimation<PointInT, PointNT, PointOutT> > pcl::RSDEstimation< PointInT, PointNT, PointOutT >::ConstPtr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
| typedef Feature<PointInT, PointOutT>::PointCloudIn pcl::RSDEstimation< PointInT, PointNT, PointOutT >::PointCloudIn |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::RSDEstimation< PointInT, PointNT, PointOutT >::PointCloudOut |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
| typedef boost::shared_ptr<RSDEstimation<PointInT, PointNT, PointOutT> > pcl::RSDEstimation< PointInT, PointNT, PointOutT >::Ptr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Constructor & Destructor Documentation
| pcl::RSDEstimation< PointInT, PointNT, PointOutT >::RSDEstimation | ( | ) | [inline] |
Member Function Documentation
| void pcl::RSDEstimation< PointInT, PointNT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Estimate the estimates the Radius-based Surface Descriptor (RSD) at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Parameters:
-
output the resultant point cloud model dataset that contains the RSD feature estimates (r_min and r_max values)
Implements pcl::Feature< PointInT, PointOutT >.
| boost::shared_ptr<std::vector<Eigen::MatrixXf, Eigen::aligned_allocator<Eigen::MatrixXf> > > pcl::RSDEstimation< PointInT, PointNT, PointOutT >::getHistograms | ( | ) | const [inline] |
| int pcl::RSDEstimation< PointInT, PointNT, PointOutT >::getNrSubdivisions | ( | ) | const [inline] |
| double pcl::RSDEstimation< PointInT, PointNT, PointOutT >::getPlaneRadius | ( | ) | const [inline] |
| bool pcl::RSDEstimation< PointInT, PointNT, PointOutT >::getSaveHistograms | ( | ) | const [inline] |
| void pcl::RSDEstimation< PointInT, PointNT, PointOutT >::setKSearch | ( | int | ) | [inline] |
Disables the setting of the number of k nearest neighbors to use for the feature estimation.
Reimplemented from pcl::Feature< PointInT, PointOutT >.
| void pcl::RSDEstimation< PointInT, PointNT, PointOutT >::setNrSubdivisions | ( | int | nr_subdiv | ) | [inline] |
| void pcl::RSDEstimation< PointInT, PointNT, PointOutT >::setPlaneRadius | ( | double | plane_radius | ) | [inline] |
Set the maximum radius, above which everything can be considered planar.
- Note:
- the order of magnitude should be around 10-20 times the search radius (0.2 works well for typical datasets).
- on accurate 3D data (e.g. openni sernsors) a search radius as low as 0.01 still gives good results.
- Parameters:
-
[in] plane_radius the new plane radius
| void pcl::RSDEstimation< PointInT, PointNT, PointOutT >::setSaveHistograms | ( | bool | save | ) | [inline] |
Member Data Documentation
boost::shared_ptr<std::vector<Eigen::MatrixXf, Eigen::aligned_allocator<Eigen::MatrixXf> > > pcl::RSDEstimation< PointInT, PointNT, PointOutT >::histograms_ [protected] |
int pcl::RSDEstimation< PointInT, PointNT, PointOutT >::nr_subdiv_ [private] |
double pcl::RSDEstimation< PointInT, PointNT, PointOutT >::plane_radius_ [private] |
bool pcl::RSDEstimation< PointInT, PointNT, PointOutT >::save_histograms_ [private] |
The documentation for this class was generated from the following files: