IterativeClosestPointWithNormals is a special case of IterativeClosestPoint, that uses a transformation estimated based on Point to Plane distances by default. More...
#include <icp.h>
Public Types | |
| typedef boost::shared_ptr < const IterativeClosestPoint < PointSource, PointTarget, Scalar > > | ConstPtr |
| typedef IterativeClosestPoint < PointSource, PointTarget, Scalar >::Matrix4 | Matrix4 |
| typedef IterativeClosestPoint < PointSource, PointTarget, Scalar >::PointCloudSource | PointCloudSource |
| typedef IterativeClosestPoint < PointSource, PointTarget, Scalar >::PointCloudTarget | PointCloudTarget |
| typedef boost::shared_ptr < IterativeClosestPoint < PointSource, PointTarget, Scalar > > | Ptr |
Public Member Functions | |
| IterativeClosestPointWithNormals () | |
| Empty constructor. | |
| virtual | ~IterativeClosestPointWithNormals () |
| Empty destructor. | |
Protected Member Functions | |
| virtual void | transformCloud (const PointCloudSource &input, PointCloudSource &output, const Matrix4 &transform) |
| Apply a rigid transform to a given dataset. | |
Detailed Description
template<typename PointSource, typename PointTarget, typename Scalar = float>
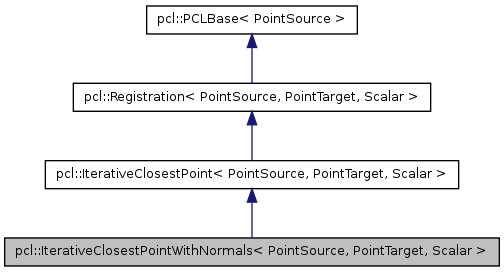
class pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >
IterativeClosestPointWithNormals is a special case of IterativeClosestPoint, that uses a transformation estimated based on Point to Plane distances by default.
Definition at line 290 of file registration/include/pcl/registration/icp.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const IterativeClosestPoint<PointSource, PointTarget, Scalar> > pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >::ConstPtr |
Reimplemented from pcl::IterativeClosestPoint< PointSource, PointTarget, Scalar >.
Definition at line 302 of file registration/include/pcl/registration/icp.h.
| typedef IterativeClosestPoint<PointSource, PointTarget, Scalar>::Matrix4 pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >::Matrix4 |
Reimplemented from pcl::IterativeClosestPoint< PointSource, PointTarget, Scalar >.
Definition at line 295 of file registration/include/pcl/registration/icp.h.
| typedef IterativeClosestPoint<PointSource, PointTarget, Scalar>::PointCloudSource pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >::PointCloudSource |
Reimplemented from pcl::IterativeClosestPoint< PointSource, PointTarget, Scalar >.
Definition at line 293 of file registration/include/pcl/registration/icp.h.
| typedef IterativeClosestPoint<PointSource, PointTarget, Scalar>::PointCloudTarget pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >::PointCloudTarget |
Reimplemented from pcl::IterativeClosestPoint< PointSource, PointTarget, Scalar >.
Definition at line 294 of file registration/include/pcl/registration/icp.h.
| typedef boost::shared_ptr<IterativeClosestPoint<PointSource, PointTarget, Scalar> > pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >::Ptr |
Reimplemented from pcl::IterativeClosestPoint< PointSource, PointTarget, Scalar >.
Definition at line 301 of file registration/include/pcl/registration/icp.h.
Constructor & Destructor Documentation
| pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >::IterativeClosestPointWithNormals | ( | ) | [inline] |
Empty constructor.
Definition at line 305 of file registration/include/pcl/registration/icp.h.
| virtual pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >::~IterativeClosestPointWithNormals | ( | ) | [inline, virtual] |
Empty destructor.
Definition at line 313 of file registration/include/pcl/registration/icp.h.
Member Function Documentation
| void pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >::transformCloud | ( | const PointCloudSource & | input, |
| PointCloudSource & | output, | ||
| const Matrix4 & | transform | ||
| ) | [protected, virtual] |
Apply a rigid transform to a given dataset.
- Parameters:
-
[in] input the input point cloud [out] output the resultant output point cloud [in] transform a 4x4 rigid transformation
- Note:
- Can be used with cloud_in equal to cloud_out
Reimplemented from pcl::IterativeClosestPoint< PointSource, PointTarget, Scalar >.
The documentation for this class was generated from the following files: