ExtractIndices extracts a set of indices from a point cloud.
Usage examples:
More...
#include <extract_indices.h>
Public Types | |
| typedef pcl::PCLPointCloud2 | PCLPointCloud2 |
| typedef PCLPointCloud2::ConstPtr | PCLPointCloud2ConstPtr |
| typedef PCLPointCloud2::Ptr | PCLPointCloud2Ptr |
Public Member Functions | |
| ExtractIndices () | |
| Empty constructor. | |
Protected Member Functions | |
| void | applyFilter (PCLPointCloud2 &output) |
| Extract point indices into a separate PointCloud. | |
| void | applyFilter (std::vector< int > &indices) |
| Extract point indices. | |
Detailed Description
template<>
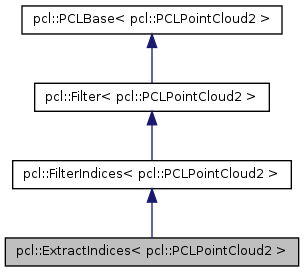
class pcl::ExtractIndices< pcl::PCLPointCloud2 >
ExtractIndices extracts a set of indices from a point cloud.
Usage examples:
pcl::ExtractIndices<PointType> filter; filter.setInputCloud (cloud_in); filter.setIndices (indices_in); // Extract the points in cloud_in referenced by indices_in as a separate point cloud: filter.filter (*cloud_out); // Retrieve indices to all points in cloud_in except those referenced by indices_in: filter.setNegative (true); filter.filter (*indices_out); // The resulting cloud_out is identical to cloud_in, but all points referenced by indices_in are made NaN: filter.setNegative (true); filter.setKeepOrganized (true); filter.filter (*cloud_out);
- Note:
- Does not inherently remove NaNs from results, hence the extract_removed_indices_ system is not used.
Definition at line 161 of file extract_indices.h.
Member Typedef Documentation
Reimplemented from pcl::FilterIndices< pcl::PCLPointCloud2 >.
Definition at line 164 of file extract_indices.h.
Reimplemented from pcl::Filter< pcl::PCLPointCloud2 >.
Definition at line 166 of file extract_indices.h.
Reimplemented from pcl::Filter< pcl::PCLPointCloud2 >.
Definition at line 165 of file extract_indices.h.
Constructor & Destructor Documentation
| pcl::ExtractIndices< pcl::PCLPointCloud2 >::ExtractIndices | ( | ) | [inline] |
Empty constructor.
Definition at line 169 of file extract_indices.h.
Member Function Documentation
| void pcl::ExtractIndices< pcl::PCLPointCloud2 >::applyFilter | ( | PCLPointCloud2 & | output | ) | [protected, virtual] |
Extract point indices into a separate PointCloud.
- Parameters:
-
[out] output the resultant point cloud
Implements pcl::Filter< pcl::PCLPointCloud2 >.
Definition at line 45 of file filters/src/extract_indices.cpp.
| void pcl::ExtractIndices< pcl::PCLPointCloud2 >::applyFilter | ( | std::vector< int > & | indices | ) | [protected, virtual] |
Extract point indices.
- Parameters:
-
indices the resultant indices
Implements pcl::FilterIndices< pcl::PCLPointCloud2 >.
Definition at line 112 of file filters/src/extract_indices.cpp.
The documentation for this class was generated from the following files: