EuclideanPlaneCoefficientComparator is a Comparator that operates on plane coefficients, for use in planar segmentation. In conjunction with OrganizedConnectedComponentSegmentation, this allows planes to be segmented from organized data. More...
#include <euclidean_plane_coefficient_comparator.h>
Public Types | |
| typedef boost::shared_ptr < const EuclideanPlaneCoefficientComparator < PointT, PointNT > > | ConstPtr |
| typedef Comparator< PointT > ::PointCloud | PointCloud |
| typedef Comparator< PointT > ::PointCloudConstPtr | PointCloudConstPtr |
| typedef pcl::PointCloud< PointNT > | PointCloudN |
| typedef PointCloudN::ConstPtr | PointCloudNConstPtr |
| typedef PointCloudN::Ptr | PointCloudNPtr |
| typedef boost::shared_ptr < EuclideanPlaneCoefficientComparator < PointT, PointNT > > | Ptr |
Public Member Functions | |
| virtual bool | compare (int idx1, int idx2) const |
| Compare two neighboring points, by using normal information, and euclidean distance information. | |
| EuclideanPlaneCoefficientComparator () | |
| Empty constructor for PlaneCoefficientComparator. | |
| virtual | ~EuclideanPlaneCoefficientComparator () |
| Destructor for PlaneCoefficientComparator. | |
Detailed Description
template<typename PointT, typename PointNT>
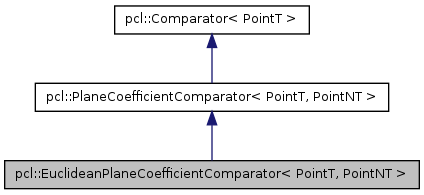
class pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >
EuclideanPlaneCoefficientComparator is a Comparator that operates on plane coefficients, for use in planar segmentation. In conjunction with OrganizedConnectedComponentSegmentation, this allows planes to be segmented from organized data.
Definition at line 55 of file euclidean_plane_coefficient_comparator.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const EuclideanPlaneCoefficientComparator<PointT, PointNT> > pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::ConstPtr |
Reimplemented from pcl::PlaneCoefficientComparator< PointT, PointNT >.
Definition at line 65 of file euclidean_plane_coefficient_comparator.h.
| typedef Comparator<PointT>::PointCloud pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::PointCloud |
Reimplemented from pcl::PlaneCoefficientComparator< PointT, PointNT >.
Definition at line 58 of file euclidean_plane_coefficient_comparator.h.
| typedef Comparator<PointT>::PointCloudConstPtr pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::PointCloudConstPtr |
Reimplemented from pcl::PlaneCoefficientComparator< PointT, PointNT >.
Definition at line 59 of file euclidean_plane_coefficient_comparator.h.
| typedef pcl::PointCloud<PointNT> pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::PointCloudN |
Reimplemented from pcl::PlaneCoefficientComparator< PointT, PointNT >.
Definition at line 60 of file euclidean_plane_coefficient_comparator.h.
| typedef PointCloudN::ConstPtr pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::PointCloudNConstPtr |
Reimplemented from pcl::PlaneCoefficientComparator< PointT, PointNT >.
Definition at line 62 of file euclidean_plane_coefficient_comparator.h.
| typedef PointCloudN::Ptr pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::PointCloudNPtr |
Reimplemented from pcl::PlaneCoefficientComparator< PointT, PointNT >.
Definition at line 61 of file euclidean_plane_coefficient_comparator.h.
| typedef boost::shared_ptr<EuclideanPlaneCoefficientComparator<PointT, PointNT> > pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::Ptr |
Reimplemented from pcl::PlaneCoefficientComparator< PointT, PointNT >.
Definition at line 64 of file euclidean_plane_coefficient_comparator.h.
Constructor & Destructor Documentation
| pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::EuclideanPlaneCoefficientComparator | ( | ) | [inline] |
Empty constructor for PlaneCoefficientComparator.
Definition at line 73 of file euclidean_plane_coefficient_comparator.h.
| virtual pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::~EuclideanPlaneCoefficientComparator | ( | ) | [inline, virtual] |
Destructor for PlaneCoefficientComparator.
Definition at line 79 of file euclidean_plane_coefficient_comparator.h.
Member Function Documentation
| virtual bool pcl::EuclideanPlaneCoefficientComparator< PointT, PointNT >::compare | ( | int | idx1, |
| int | idx2 | ||
| ) | const [inline, virtual] |
Compare two neighboring points, by using normal information, and euclidean distance information.
- Parameters:
-
[in] idx1 The index of the first point. [in] idx2 The index of the second point.
Reimplemented from pcl::PlaneCoefficientComparator< PointT, PointNT >.
Definition at line 88 of file euclidean_plane_coefficient_comparator.h.
The documentation for this class was generated from the following file: