CRHEstimation estimates the Camera Roll Histogram (CRH) descriptor for a given point cloud dataset containing XYZ data and normals, as presented in: More...
#include <crh.h>
Public Types | |
| typedef boost::shared_ptr < const CRHEstimation < PointInT, PointNT, PointOutT > > | ConstPtr |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
| typedef boost::shared_ptr < CRHEstimation< PointInT, PointNT, PointOutT > > | Ptr |
Public Member Functions | |
| CRHEstimation () | |
| Constructor. | |
| void | getViewPoint (float &vpx, float &vpy, float &vpz) |
| Get the viewpoint. | |
| void | setCentroid (Eigen::Vector4f ¢roid) |
| void | setViewPoint (float vpx, float vpy, float vpz) |
| Set the viewpoint. | |
Private Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate the CRH histogram at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface () | |
Private Attributes | |
| Eigen::Vector4f | centroid_ |
| Centroid to be used. | |
| int | nbins_ |
| Number of bins, this should match the Output type. | |
| float | vpx_ |
| Values describing the viewpoint ("pinhole" camera model assumed). By default, the viewpoint is set to 0,0,0. | |
| float | vpy_ |
| float | vpz_ |
Detailed Description
template<typename PointInT, typename PointNT, typename PointOutT = pcl::Histogram<90>>
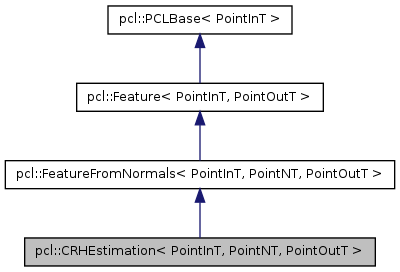
class pcl::CRHEstimation< PointInT, PointNT, PointOutT >
CRHEstimation estimates the Camera Roll Histogram (CRH) descriptor for a given point cloud dataset containing XYZ data and normals, as presented in:
- CAD-Model Recognition and 6 DOF Pose Estimation A. Aldoma, N. Blodow, D. Gossow, S. Gedikli, R.B. Rusu, M. Vincze and G. Bradski ICCV 2011, 3D Representation and Recognition (3dRR11) workshop Barcelona, Spain, (2011)
The suggested PointOutT is pcl::Histogram<90>. //dc (real) + 44 complex numbers (real, imaginary) + nyquist (real)
Member Typedef Documentation
| typedef boost::shared_ptr<const CRHEstimation<PointInT, PointNT, PointOutT> > pcl::CRHEstimation< PointInT, PointNT, PointOutT >::ConstPtr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::CRHEstimation< PointInT, PointNT, PointOutT >::PointCloudOut |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
| typedef boost::shared_ptr<CRHEstimation<PointInT, PointNT, PointOutT> > pcl::CRHEstimation< PointInT, PointNT, PointOutT >::Ptr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Constructor & Destructor Documentation
| pcl::CRHEstimation< PointInT, PointNT, PointOutT >::CRHEstimation | ( | ) | [inline] |
Member Function Documentation
| void pcl::CRHEstimation< PointInT, PointNT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [private, virtual] |
Estimate the CRH histogram at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface ()
- Parameters:
-
[out] output the resultant point cloud with a CRH histogram
Implements pcl::Feature< PointInT, PointOutT >.
| void pcl::CRHEstimation< PointInT, PointNT, PointOutT >::getViewPoint | ( | float & | vpx, |
| float & | vpy, | ||
| float & | vpz | ||
| ) | [inline] |
| void pcl::CRHEstimation< PointInT, PointNT, PointOutT >::setCentroid | ( | Eigen::Vector4f & | centroid | ) | [inline] |
| void pcl::CRHEstimation< PointInT, PointNT, PointOutT >::setViewPoint | ( | float | vpx, |
| float | vpy, | ||
| float | vpz | ||
| ) | [inline] |
Member Data Documentation
Eigen::Vector4f pcl::CRHEstimation< PointInT, PointNT, PointOutT >::centroid_ [private] |
int pcl::CRHEstimation< PointInT, PointNT, PointOutT >::nbins_ [private] |
float pcl::CRHEstimation< PointInT, PointNT, PointOutT >::vpx_ [private] |
float pcl::CRHEstimation< PointInT, PointNT, PointOutT >::vpy_ [private] |
float pcl::CRHEstimation< PointInT, PointNT, PointOutT >::vpz_ [private] |
The documentation for this class was generated from the following files: