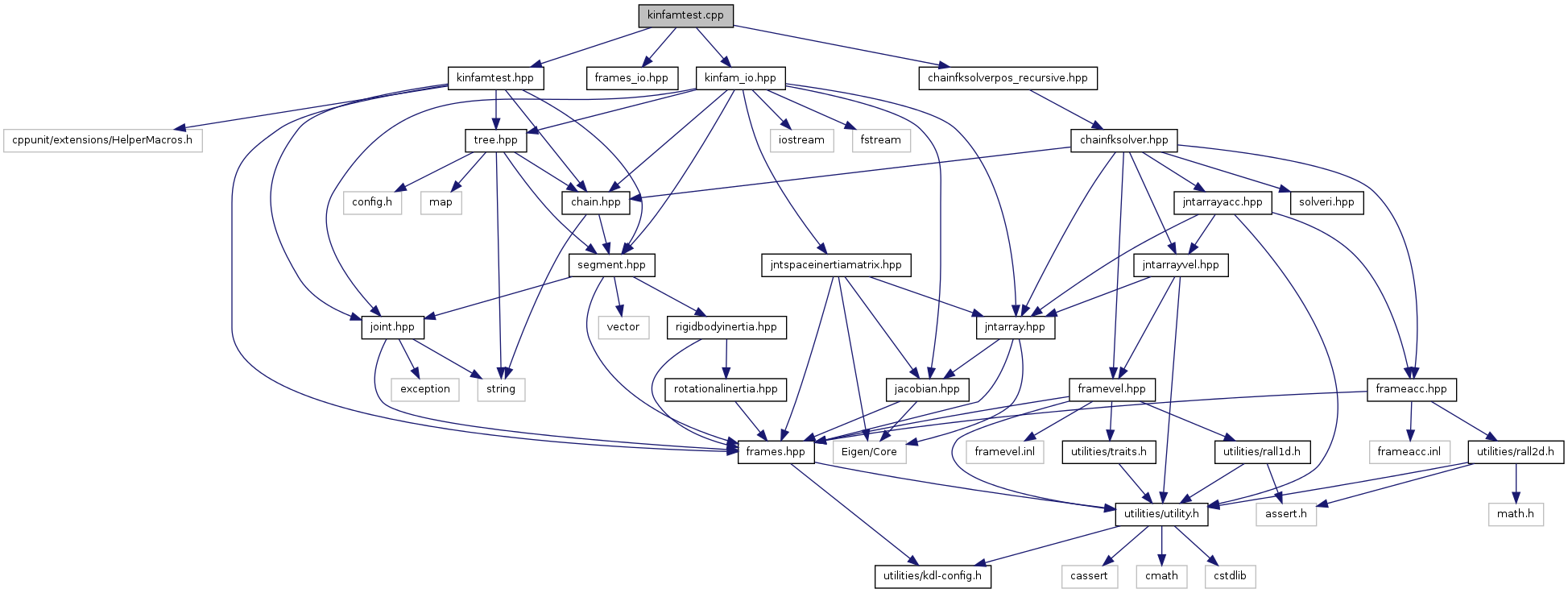
#include "kinfamtest.hpp"#include <frames_io.hpp>#include <kinfam_io.hpp>#include <chainfksolverpos_recursive.hpp>
Include dependency graph for kinfamtest.cpp:
Go to the source code of this file.
Functions | |
| CPPUNIT_TEST_SUITE_REGISTRATION (KinFamTest) | |