#include <convex_connected_voxels.h>
Public Types | |
| typedef pcl::PointXYZRGB | PointT |
Public Member Functions | |
| ConvexConnectedVoxels () | |
Protected Member Functions | |
| void | cloud_cb (const sensor_msgs::PointCloud2::ConstPtr &) |
| void | estimatePointCloudNormals (const pcl::PointCloud< PointT >::Ptr, pcl::PointCloud< pcl::Normal >::Ptr, const int=8, const double=0.02, bool=true) |
| void | getConvexLabelCloudIndices (const std::vector< pcl::PointCloud< PointT >::Ptr > &, pcl::PointCloud< PointT >::Ptr, const std::vector< int > &, std::map< int, pcl::PointIndices > &) |
| void | indices_cb (const jsk_recognition_msgs::ClusterPointIndices &) |
| void | nearestNeigborSearch (pcl::PointCloud< pcl::PointXYZ >::Ptr, std::vector< std::vector< int > > &, const int=8, const double=0.02, bool=true) |
| virtual void | onInit () |
| void | segmentCloud (const pcl::PointCloud< PointT >::Ptr, const std::vector< pcl::PointIndices > &, std::vector< pcl::PointCloud< PointT >::Ptr > &, std::vector< pcl::PointCloud< pcl::Normal >::Ptr > &, pcl::PointCloud< pcl::PointXYZ >::Ptr) |
| virtual void | subscribe () |
| virtual void | unsubscribe () |
| virtual void | updateDiagnostic (diagnostic_updater::DiagnosticStatusWrapper &) |
Protected Attributes | |
| boost::mutex | mutex_ |
| ros::NodeHandle | nh_ |
| ros::Publisher | pub_indices_ |
| ros::Subscriber | sub_cloud_ |
| ros::Subscriber | sub_indices_ |
Private Attributes | |
| std::vector< pcl::PointIndices > | indices_ |
Detailed Description
Definition at line 82 of file convex_connected_voxels.h.
Member Typedef Documentation
| typedef pcl::PointXYZRGB jsk_pcl_ros::ConvexConnectedVoxels::PointT |
Definition at line 86 of file convex_connected_voxels.h.
Constructor & Destructor Documentation
Definition at line 85 of file convex_connected_voxels.h.
Member Function Documentation
| void jsk_pcl_ros::ConvexConnectedVoxels::cloud_cb | ( | const sensor_msgs::PointCloud2::ConstPtr & | cloud_msg | ) | [protected] |
Definition at line 76 of file convex_connected_voxels_nodelet.cpp.
| void jsk_pcl_ros::ConvexConnectedVoxels::estimatePointCloudNormals | ( | const pcl::PointCloud< PointT >::Ptr | cloud, |
| pcl::PointCloud< pcl::Normal >::Ptr | s_normal, | ||
| const int | k = 8, |
||
| const double | radius = 0.02, |
||
| bool | ksearch = true |
||
| ) | [protected] |
Definition at line 174 of file convex_connected_voxels_nodelet.cpp.
| void jsk_pcl_ros::ConvexConnectedVoxels::getConvexLabelCloudIndices | ( | const std::vector< pcl::PointCloud< PointT >::Ptr > & | cloud_clusters, |
| pcl::PointCloud< PointT >::Ptr | cloud, | ||
| const std::vector< int > & | labelMD, | ||
| std::map< int, pcl::PointIndices > & | all_indices | ||
| ) | [protected] |
Definition at line 217 of file convex_connected_voxels_nodelet.cpp.
| void jsk_pcl_ros::ConvexConnectedVoxels::indices_cb | ( | const jsk_recognition_msgs::ClusterPointIndices & | indices_msg | ) | [protected] |
Definition at line 122 of file convex_connected_voxels_nodelet.cpp.
| void jsk_pcl_ros::ConvexConnectedVoxels::nearestNeigborSearch | ( | pcl::PointCloud< pcl::PointXYZ >::Ptr | cloud, |
| std::vector< std::vector< int > > & | pointIndices, | ||
| const int | k = 8, |
||
| const double | radius = 0.02, |
||
| bool | isneigbour = true |
||
| ) | [protected] |
Definition at line 193 of file convex_connected_voxels_nodelet.cpp.
| void jsk_pcl_ros::ConvexConnectedVoxels::onInit | ( | void | ) | [protected, virtual] |
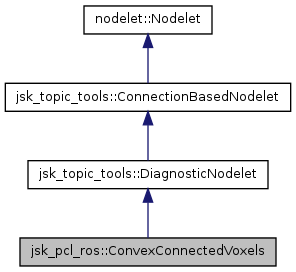
Reimplemented from jsk_topic_tools::DiagnosticNodelet.
Definition at line 40 of file convex_connected_voxels_nodelet.cpp.
| void jsk_pcl_ros::ConvexConnectedVoxels::segmentCloud | ( | const pcl::PointCloud< PointT >::Ptr | cloud, |
| const std::vector< pcl::PointIndices > & | indices, | ||
| std::vector< pcl::PointCloud< PointT >::Ptr > & | cloud_clusters, | ||
| std::vector< pcl::PointCloud< pcl::Normal >::Ptr > & | normal_clusters, | ||
| pcl::PointCloud< pcl::PointXYZ >::Ptr | centroids | ||
| ) | [protected] |
Definition at line 137 of file convex_connected_voxels_nodelet.cpp.
| void jsk_pcl_ros::ConvexConnectedVoxels::subscribe | ( | ) | [protected, virtual] |
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 48 of file convex_connected_voxels_nodelet.cpp.
| void jsk_pcl_ros::ConvexConnectedVoxels::unsubscribe | ( | ) | [protected, virtual] |
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 58 of file convex_connected_voxels_nodelet.cpp.
| void jsk_pcl_ros::ConvexConnectedVoxels::updateDiagnostic | ( | diagnostic_updater::DiagnosticStatusWrapper & | stat | ) | [protected, virtual] |
Reimplemented from jsk_topic_tools::DiagnosticNodelet.
Definition at line 64 of file convex_connected_voxels_nodelet.cpp.
Member Data Documentation
std::vector<pcl::PointIndices> jsk_pcl_ros::ConvexConnectedVoxels::indices_ [private] |
Definition at line 129 of file convex_connected_voxels.h.
Definition at line 116 of file convex_connected_voxels.h.
Reimplemented from nodelet::Nodelet.
Definition at line 120 of file convex_connected_voxels.h.
Definition at line 119 of file convex_connected_voxels.h.
Definition at line 117 of file convex_connected_voxels.h.
Definition at line 118 of file convex_connected_voxels.h.
The documentation for this class was generated from the following files: