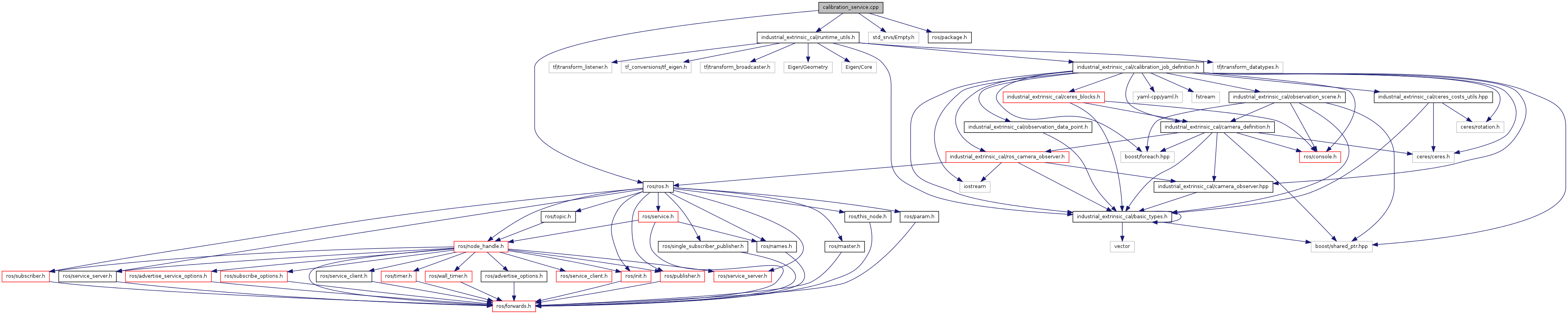
#include <industrial_extrinsic_cal/runtime_utils.h>#include <std_srvs/Empty.h>#include <ros/ros.h>#include <ros/package.h>
Include dependency graph for calibration_service.cpp:
Go to the source code of this file.
Functions | |
| bool | callback (std_srvs::Empty::Request &request, std_srvs::Empty::Response &response) |
| int | main (int argc, char **argv) |
Variables | |
| std::vector< tf::Transform > | b_transforms |
| bool | calibrated = false |
Function Documentation
| bool callback | ( | std_srvs::Empty::Request & | request, |
| std_srvs::Empty::Response & | response | ||
| ) |
Definition at line 116 of file calibration_service.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 28 of file calibration_service.cpp.
Variable Documentation
| std::vector<tf::Transform> b_transforms |
Definition at line 26 of file calibration_service.cpp.
| bool calibrated = false |
Definition at line 24 of file calibration_service.cpp.