#include <boost/thread.hpp>#include <deque>#include <vector>#include <boost/thread/mutex.hpp>#include <boost/thread/condition.hpp>#include <boost/shared_ptr.hpp>#include <boost/preprocessor/slot/counter.hpp>#include "EventSystem.h"#include "TaskResult.h"
Include dependency graph for BT.h:

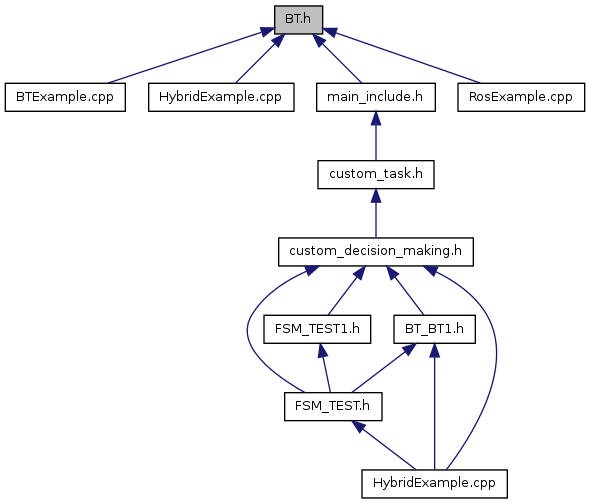
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | decision_making::BTCaller |
| struct | decision_making::BTContext |
| struct | decision_making::BTNode |
Namespaces | |
| namespace | decision_making |
Defines | |
| #define | ___BTLABEL_(p, a) ___BTMERGE_(p, a) |
| #define | ___BTMERGE_(a, b) a##b |
| #define | ___BTUNIQUE_NAME(p) ___BTLABEL_(p,__COUNTER__) |
| #define | __BT_CALL_BT_CALLER(NAME) |
| #define | __BT_CALL_BT_NONAME(NAME) |
| #define | __BT_CREATE_BT_CALL_FUNCTION(BTNAME, P_call_ctx, P_events_queu) |
| #define | __BT_END_NODE(NAME) |
| #define | __BT_END_NODE_NONAME |
| #define | __BT_END_TASK(NAME) __BT_END_NODE(NAME); BT_CALL_BT(NAME) |
| #define | __BT_END_TASK_NONAME __BT_END_NODE_NONAME; __BT_CALL_BT_NONAME(__COUNTER__) |
| #define | __BT_NODE_BGN(TYPE, NAME, STR) |
| #define | __BT_POSTDEF ;} |
| #define | __BT_PREDEF(NAME) |
| #define | __BTDEFSUBCTEXT(NAME) decision_making::CallContext& call_ctx_##NAME(call_ctx); |
| #define | __BTDEFSUBEVENTQUEUE(NAME) decision_making::EventQueue events_##NAME(&events); |
| #define | __CALL_BT_FUNCTION(NAME, CALLS, EVENTS) _bt_function_struct_instance##BT1.getThread() |
| #define | __MAX(x, y) ((x)>(y)?(x):(y)) |
| #define | __MIN(x, y) ((x)<(y)?(x):(y)) |
| #define | BT_BGN(NAME) __BT_NODE_BGN(BT_SEQ, NAME, "=>") |
| #define | BT_CALL_BT(NAME) |
| #define | BT_CALL_FSM(NAME) |
| #define | BT_CALL_TASK(NAME) |
| #define | BT_CONTEXT calls |
| #define | BT_DEC_FAIL_BGN(ERROR_CODE) BT_TASK_BGN(___BTUNIQUE_NAME(_lbl_BT_DEC_FAIL_)){ int _error_code = ERROR_CODE; |
| #define | BT_DEC_FAIL_END |
| #define | BT_DEC_NOT_BGN BT_TASK_BGN(___BTUNIQUE_NAME(_lbl_BT_DEC_NOT_)){ |
| #define | BT_DEC_NOT_END |
| #define | BT_DEC_SUCCESS_BGN BT_TASK_BGN(___BTUNIQUE_NAME(_lbl_BT_DEC_SUCCESS_)){ |
| #define | BT_DEC_SUCCESS_END |
| #define | BT_DEC_WHILE_BGN(CONDITION) |
| #define | BT_DEC_WHILE_END |
| #define | BT_END(NAME) __BT_END_NODE(NAME) |
| #define | BT_HEADER(NAME) struct BT_NODE_TYPE(NAME); |
| #define | BT_INNER_CONTEXT context |
| #define | BT_LAST_NODE __ALL_NODES.back() |
| #define | BT_NEW_INNER_CONTEXT(...) struct BTContext{__VA_ARGS__} context |
| #define | BT_NODE(NAME) __BT_NODE_##NAME##_INSTANCE |
| #define | BT_NODE_NEW_PTR(NAME) BT_NODE_PTR(NAME)((BTNode*)new BT_NODE_TYPE(NAME)(this)) |
| #define | BT_NODE_PTR(NAME) boost::shared_ptr<BTNode> |
| #define | BT_NODE_TYPE(NAME) __BT_NODE_##NAME##_STRUCT |
| #define | BT_PAR_BGN(NAME) __BT_PREDEF(NAME) __BT_NODE_BGN(BT_PAR, NAME, "||") |
| #define | BT_PAR_END(NAME) __BT_END_TASK(NAME) __BT_POSTDEF |
| #define | BT_RAISE(EVENT) |
| #define | BT_RENAME_INNER_CONTEXT(NEW_NAME) typedef BTContext NEW_NAME##Type; NEW_NAME##Type& NEW_NAME=context; |
| #define | BT_RISE(EVENT) BT_RAISE(EVENT) |
| #define | BT_ROOT_BGN(NAME, EVENTS) |
| #define | BT_RUN_LAST_NODE BT_LAST_NODE->run() |
| #define | BT_RUN_NODE(NAME) BT_NODE(NODE)->run() |
| #define | BT_SEL_BGN(NAME) __BT_PREDEF(NAME) __BT_NODE_BGN(BT_SEL, NAME, "??") |
| #define | BT_SEL_END(NAME) __BT_END_TASK(NAME) __BT_POSTDEF |
| #define | BT_SEQ_BGN(NAME) __BT_PREDEF(NAME) __BT_NODE_BGN(BT_SEQ, NAME, "->") |
| #define | BT_SEQ_END(NAME) __BT_END_TASK(NAME) __BT_POSTDEF |
| #define | BT_SET_TASK_RESULT(RESULT) |
| #define | BT_SET_TASK_RESULT_AFTER(RESULT, time) |
| #define | BT_SLEEP(time) for(int i=0;i<__MAX(1,(float(time)/0.5F)) and not isTerminated();i++){ boost::this_thread::sleep(boost::posix_time::milliseconds(1000*__MIN(0.5F,time-0.5F*i))); } |
| #define | BT_TASK_BGN(NAME) __BT_PREDEF(NAME) __BT_NODE_BGN(BT_TASK, NAME, "") decision_making::TaskResult bt_node_return_value = decision_making::TaskResult::UNDEF(); |
| #define | BT_TASK_END(NAME) __BT_END_TASK(NAME) __BT_POSTDEF |
| #define | BT_TASK_END_NONAME __BT_END_TASK_NONAME __BT_POSTDEF |
| #define | BT_TASK_RESULT(X) bt_node_return_value = X |
| #define | BTNodeContructorParams_DEF BTNodeTYPE t, string node_name, const CallContext& parent_call_ctx, EventQueue& events |
| #define | BTNodeContructorParams_USE parent_call_ctx, events |
| #define | DMDEBUG(...) |
Typedefs | |
| typedef BTNode | decision_making::CurrentNodeType |
Functions | |
| static EventQueue & | decision_making::__tmp_event_queue () |
Define Documentation
| #define ___BTLABEL_ | ( | p, | |
| a | |||
| ) | ___BTMERGE_(p, a) |
| #define ___BTMERGE_ | ( | a, | |
| b | |||
| ) | a##b |
| #define ___BTUNIQUE_NAME | ( | p | ) | ___BTLABEL_(p,__COUNTER__) |
| #define __BT_CALL_BT_CALLER | ( | NAME | ) |
Value:
call_ctx.pop(); \
BT_NODE_PTR(NAME) BT_NODE(NAME)((BTNode*)new BT_NODE_TYPE(NAME)(this, context, call_ctx, events));\
__ALL_NODES.push_back(BT_NODE(NAME))
| #define __BT_CALL_BT_NONAME | ( | NAME | ) |
| #define __BT_CREATE_BT_CALL_FUNCTION | ( | BTNAME, | |
| P_call_ctx, | |||
| P_events_queu | |||
| ) |
Value:
struct _bt_function_struct##BTNAME: public decision_making::BTCaller{\ _bt_function_structBT1(std::string task_address, decision_making::CallContext& call_ctx, decision_making::EventQueue& queue):decision_making::BTCaller(task_address,call_ctx,queue){}\ decision_making::TaskResult _bt_function(){\ BTContext _tmp_context;\ BT_ROOT_BGN(bt_from_fsm, __tmp_event_queue()){\ call_ctx.pop();\ BT_PAR_BGN(TMP){\ call_ctx.pop();\ BT_TASK_BGN(STOP_CONDITION){\ while(not isTerminated())\ {\ decision_making::Event e = events.waitEvent();\ if(not e){\ DMDEBUG( cout<<" (STOP_CONDITION:TERMINATED) "; )\ BT_TASK_RESULT( decision_making::TaskResult::TERMINATED() );\ break;\ }\ }\ }\ BT_TASK_END(STOP_CONDITION);\ __BT_CALL_BT_CALLER(BTNAME);\ }\ BT_PAR_END(TMP);\ }\ BT_END(bt_from_fsm) bt_from_fsm(_tmp_context, call_ctx, queue);\ decision_making::TaskResult res = bt_from_fsm.run();\ DMDEBUG( cout<<"(fsm from function finished)"; )\ return res;\ }\ } _bt_function_struct_instanceBT1(#BTNAME, P_call_ctx, P_events_queu);
| #define __BT_END_NODE | ( | NAME | ) |
Value:
this->run_all();\
DMDEBUG( cout<<" }[BT:" #NAME "] "; )\
ON_BT_NODE_END(#NAME, call_ctx, events, bt_node_return_value);\
return bt_node_return_value;\
}\
}
| #define __BT_END_NODE_NONAME |
Value:
this->run_all();\
DMDEBUG( cout<<" }[BT:" <<MY_NODE_NAME<< "] "; )\
ON_BT_NODE_END(MY_NODE_NAME, call_ctx, events, bt_node_return_value);\
return bt_node_return_value;\
}\
}
| #define __BT_END_TASK | ( | NAME | ) | __BT_END_NODE(NAME); BT_CALL_BT(NAME) |
| #define __BT_END_TASK_NONAME __BT_END_NODE_NONAME; __BT_CALL_BT_NONAME(__COUNTER__) |
| #define __BT_NODE_BGN | ( | TYPE, | |
| NAME, | |||
| STR | |||
| ) |
Value:
struct BT_NODE_TYPE(NAME):public BTNode\ { \ typedef BT_NODE_TYPE(NAME) MY_NODE_TYPE;\ BTContext& context;\ std::string MY_NODE_NAME;\ BT_NODE_TYPE(NAME)(BTNode* p, BTContext& ctx, const decision_making::CallContext& calls, decision_making::EventQueue& events):BTNode(TYPE, #NAME, calls, events),context(ctx),MY_NODE_NAME(#NAME){\ p->tasks.push_back(this);\ }\ TaskResult run()\ {\ DMDEBUG( cout<<" [BT:" #NAME STR "]{ "; ) \ ON_BT_NODE_START(#NAME, #TYPE, call_ctx, events);\ BTNode* const& selfPtrForRosTaskCaller=this;\ std::vector<BT_NODE_PTR()> __ALL_NODES;
| #define __BT_POSTDEF ;} |
| #define __BT_PREDEF | ( | NAME | ) |
Value:
BT_NODE_PTR(NAME) BT_NODE(NAME); \ {\ BT_NODE_PTR(NAME)& CUR_NODE=BT_NODE(NAME);\ struct BT_NODE_TYPE(NAME);\ typedef BT_NODE_TYPE(NAME) __LAST_BT_NODE_TYPE;\ typedef BT_NODE_PTR(NAME) __LAST_BT_NODE_PTR;
| #define __BTDEFSUBCTEXT | ( | NAME | ) | decision_making::CallContext& call_ctx_##NAME(call_ctx); |
| #define __BTDEFSUBEVENTQUEUE | ( | NAME | ) | decision_making::EventQueue events_##NAME(&events); |
| #define __CALL_BT_FUNCTION | ( | NAME, | |
| CALLS, | |||
| EVENTS | |||
| ) | _bt_function_struct_instance##BT1.getThread() |
| #define BT_CALL_BT | ( | NAME | ) |
Value:
BT_NODE_PTR(NAME) BT_NODE(NAME)((BTNode*)new BT_NODE_TYPE(NAME)(this, context, call_ctx, events));\ __ALL_NODES.push_back(BT_NODE(NAME));\ CUR_NODE = BT_NODE(NAME);
| #define BT_CALL_FSM | ( | NAME | ) |
Value:
__BT_NODE_BGN(BT_TASK, NAME, "")\ call_ctx.pop();\ bt_node_return_value = Fsm##NAME(&call_ctx, &events);\ __BT_END_TASK(NAME)
| #define BT_CALL_TASK | ( | NAME | ) |
Value:
__BT_NODE_BGN(BT_TASK, NAME, "")\ __BTDEFSUBEVENTQUEUE(NAME) __BTDEFSUBCTEXT(NAME)\ bt_node_return_value = CALL_REMOTE(NAME,boost::ref(call_ctx_##NAME), boost::ref(events_##NAME))(); \ __BT_END_TASK(NAME)
| #define BT_CONTEXT calls |
| #define BT_DEC_FAIL_BGN | ( | ERROR_CODE | ) | BT_TASK_BGN(___BTUNIQUE_NAME(_lbl_BT_DEC_FAIL_)){ int _error_code = ERROR_CODE; |
| #define BT_DEC_FAIL_END |
Value:
decision_making::TaskResult res1 = BT_LAST_NODE->run();\ BT_TASK_RESULT( decision_making::TaskResult::FAIL(_error_code) );\ }BT_TASK_END_NONAME;
| #define BT_DEC_NOT_BGN BT_TASK_BGN(___BTUNIQUE_NAME(_lbl_BT_DEC_NOT_)){ |
| #define BT_DEC_NOT_END |
Value:
decision_making::TaskResult res1 = BT_LAST_NODE->run();\ BT_TASK_RESULT( res1==decision_making::TaskResult::SUCCESS()?decision_making::TaskResult::FAIL("NOT"):decision_making::TaskResult::SUCCESS() );\ }BT_TASK_END_NONAME;
| #define BT_DEC_SUCCESS_BGN BT_TASK_BGN(___BTUNIQUE_NAME(_lbl_BT_DEC_SUCCESS_)){ |
| #define BT_DEC_SUCCESS_END |
Value:
decision_making::TaskResult res1 = BT_LAST_NODE->run();\ BT_TASK_RESULT( decision_making::TaskResult::SUCCESS() );\ }BT_TASK_END_NONAME;
| #define BT_DEC_WHILE_BGN | ( | CONDITION | ) |
Value:
BT_TASK_BGN(___BTUNIQUE_NAME(_lbl_BT_DEC_WHILE_)){ \ struct CHECK_RESULT{\ decision_making::TaskResult task_result;\ bool check(){ return task_result.CONDITION ;}\ } _CHECK_RESULT;\ do{
| #define BT_DEC_WHILE_END |
Value:
if(not isTerminated())\ _CHECK_RESULT.task_result = BT_LAST_NODE->run(); }while( _CHECK_RESULT.check() and not isTerminated() );\ BT_TASK_RESULT( _CHECK_RESULT.task_result );\ }BT_TASK_END_NONAME;
| #define BT_INNER_CONTEXT context |
| #define BT_LAST_NODE __ALL_NODES.back() |
| #define BT_NEW_INNER_CONTEXT | ( | ... | ) | struct BTContext{__VA_ARGS__} context |
| #define BT_NODE_NEW_PTR | ( | NAME | ) | BT_NODE_PTR(NAME)((BTNode*)new BT_NODE_TYPE(NAME)(this)) |
| #define BT_NODE_PTR | ( | NAME | ) | boost::shared_ptr<BTNode> |
| #define BT_NODE_TYPE | ( | NAME | ) | __BT_NODE_##NAME##_STRUCT |
| #define BT_PAR_BGN | ( | NAME | ) | __BT_PREDEF(NAME) __BT_NODE_BGN(BT_PAR, NAME, "||") |
| #define BT_PAR_END | ( | NAME | ) | __BT_END_TASK(NAME) __BT_POSTDEF |
| #define BT_RAISE | ( | EVENT | ) |
Value:
DMDEBUG( cout<<" RAISE("<<node_name<<":"<<decision_making::Event(EVENT, call_ctx)<<") "; ) \ events.raiseEvent(decision_making::Event(EVENT, call_ctx));
| #define BT_RENAME_INNER_CONTEXT | ( | NEW_NAME | ) | typedef BTContext NEW_NAME##Type; NEW_NAME##Type& NEW_NAME=context; |
| #define BT_ROOT_BGN | ( | NAME, | |
| EVENTS | |||
| ) |
Value:
struct BT_NODE_TYPE(NAME):public BTNode\ { \ BTContext _tmp_context; BTContext& context;\ BT_NODE_TYPE(NAME)():BTNode(BT_SEQ, #NAME, decision_making::CallContext(), EVENTS),_tmp_context(),context(_tmp_context){}\ BT_NODE_TYPE(NAME)(BTContext& ctx, const decision_making::CallContext& calls, decision_making::EventQueue& events):BTNode(BT_SEQ, #NAME, calls, events),context(ctx){}\ TaskResult run(){\ DMDEBUG( cout<<" [BT:" #NAME " MAIN" "]{ "; ) \ ON_BT_NODE_START(#NAME, "ROOT", call_ctx, events);\ BTNode* const& selfPtrForRosTaskCaller=this;\ std::vector< BT_NODE_PTR() > __ALL_NODES;
| #define BT_RUN_LAST_NODE BT_LAST_NODE->run() |
| #define BT_RUN_NODE | ( | NAME | ) | BT_NODE(NODE)->run() |
| #define BT_SEL_BGN | ( | NAME | ) | __BT_PREDEF(NAME) __BT_NODE_BGN(BT_SEL, NAME, "??") |
| #define BT_SEL_END | ( | NAME | ) | __BT_END_TASK(NAME) __BT_POSTDEF |
| #define BT_SEQ_BGN | ( | NAME | ) | __BT_PREDEF(NAME) __BT_NODE_BGN(BT_SEQ, NAME, "->") |
| #define BT_SEQ_END | ( | NAME | ) | __BT_END_TASK(NAME) __BT_POSTDEF |
| #define BT_SET_TASK_RESULT | ( | RESULT | ) |
Value:
BT_TASK_BGN(___BTUNIQUE_NAME(_lbl_BT_SET_TASK_RESULT_)){ \ BT_TASK_RESULT( RESULT );\ }BT_TASK_END_NONAME;
| #define BT_SET_TASK_RESULT_AFTER | ( | RESULT, | |
| time | |||
| ) |
Value:
BT_TASK_BGN(___BTUNIQUE_NAME(_lbl_BT_SET_TASK_RESULT_)){ \ BT_SLEEP(time)\ BT_TASK_RESULT( RESULT );\ }BT_TASK_END_NONAME;
| #define BT_TASK_BGN | ( | NAME | ) | __BT_PREDEF(NAME) __BT_NODE_BGN(BT_TASK, NAME, "") decision_making::TaskResult bt_node_return_value = decision_making::TaskResult::UNDEF(); |
| #define BT_TASK_END | ( | NAME | ) | __BT_END_TASK(NAME) __BT_POSTDEF |
| #define BT_TASK_RESULT | ( | X | ) | bt_node_return_value = X |
| #define BTNodeContructorParams_DEF BTNodeTYPE t, string node_name, const CallContext& parent_call_ctx, EventQueue& events |
| #define BTNodeContructorParams_USE parent_call_ctx, events |