Base class for interfacing online state/parameter estimators. More...
#include <estimator.hpp>
Public Member Functions | |
| virtual Estimator * | clone () const =0 |
| Estimator () | |
| Estimator (double _samplingTime) | |
| Estimator (const Estimator &rhs) | |
| uint | getNP () const |
| uint | getNU () const |
| uint | getNW () const |
| uint | getNX () const |
| uint | getNXA () const |
| uint | getNY () const |
| returnValue | getOutputs (DVector &_x, DVector &_xa, DVector &_u, DVector &_p, DVector &_w) const |
| returnValue | getP (DVector &_p) const |
| returnValue | getU (DVector &_u) const |
| returnValue | getW (DVector &_w) const |
| returnValue | getX (DVector &_x) const |
| returnValue | getXA (DVector &_xa) const |
| virtual returnValue | init (double startTime=0.0, const DVector &x0_=emptyConstVector, const DVector &p_=emptyConstVector) |
| Estimator & | operator= (const Estimator &rhs) |
| virtual returnValue | step (double currentTime, const DVector &_y)=0 |
| virtual | ~Estimator () |
Protected Attributes | |
| DVector | p |
| DVector | u |
| DVector | w |
| DVector | x |
| DVector | xa |
Detailed Description
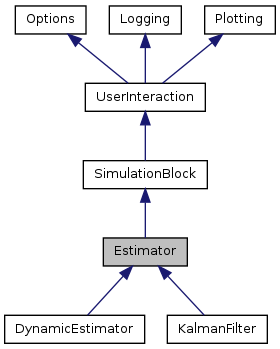
Base class for interfacing online state/parameter estimators.
The class Estimator serves as a base class for interfacing online state/parameter estimators.
Definition at line 56 of file estimator.hpp.
Constructor & Destructor Documentation
Default constructor.
Definition at line 45 of file estimator.cpp.
| Estimator::Estimator | ( | double | _samplingTime | ) |
Constructor taking minimal sub-block configuration.
Definition at line 50 of file estimator.cpp.
| Estimator::Estimator | ( | const Estimator & | rhs | ) |
Copy constructor (deep copy).
Definition at line 57 of file estimator.cpp.
| Estimator::~Estimator | ( | ) | [virtual] |
Destructor.
Definition at line 67 of file estimator.cpp.
Member Function Documentation
| virtual Estimator* Estimator::clone | ( | ) | const [pure virtual] |
Implemented in DynamicEstimator, and KalmanFilter.
| uint Estimator::getNP | ( | ) | const [inline] |
Returns number of estimated parameters.
- Returns:
- Number of estimated parameters
| uint Estimator::getNU | ( | ) | const [inline] |
Returns number of estimated previous controls.
- Returns:
- Number of estimated previous controls
| uint Estimator::getNW | ( | ) | const [inline] |
Returns number of estimated disturbances.
- Returns:
- Number of estimated disturbances
| uint Estimator::getNX | ( | ) | const [inline] |
Returns number of estimated differential states.
- Returns:
- Number of estimated differential states
| uint Estimator::getNXA | ( | ) | const [inline] |
Returns number of estimated algebraic states.
- Returns:
- Number of estimated algebraic states
| uint Estimator::getNY | ( | ) | const [inline] |
Returns number of process outputs.
- Returns:
- Number of process outputs
| returnValue Estimator::getOutputs | ( | DVector & | _x, |
| DVector & | _xa, | ||
| DVector & | _u, | ||
| DVector & | _p, | ||
| DVector & | _w | ||
| ) | const [inline] |
Returns all estimator outputs.
- Parameters:
-
_x Estimated differential states. _xa Estimated algebraic states. _u Estimated previous controls. _p Estimated parameters. _w Estimated disturbances.
| returnValue Estimator::getP | ( | DVector & | _p | ) | const [inline] |
Returns estimated parameters.
- Parameters:
-
_p OUTPUT: estimated parameters.
| returnValue Estimator::getU | ( | DVector & | _u | ) | const [inline] |
Returns estimated previous controls.
- Parameters:
-
_u OUTPUT: estimated previous controls.
| returnValue Estimator::getW | ( | DVector & | _w | ) | const [inline] |
Returns estimated disturbances.
- Parameters:
-
_w OUTPUT: estimated disturbances.
| returnValue Estimator::getX | ( | DVector & | _x | ) | const [inline] |
Returns estimated differential states.
- Parameters:
-
_x OUTPUT: estimated differential states.
| returnValue Estimator::getXA | ( | DVector & | _xa | ) | const [inline] |
Returns estimated algebraic states.
- Parameters:
-
_xa OUTPUT: estimated algebraic states.
| returnValue Estimator::init | ( | double | startTime = 0.0, |
| const DVector & | x0_ = emptyConstVector, |
||
| const DVector & | p_ = emptyConstVector |
||
| ) | [virtual] |
Initialization.
Reimplemented in DynamicEstimator, and KalmanFilter.
Definition at line 89 of file estimator.cpp.
Assignment operator (deep copy).
Definition at line 72 of file estimator.cpp.
| virtual returnValue Estimator::step | ( | double | currentTime, |
| const DVector & | _y | ||
| ) | [pure virtual] |
Executes next single step.
Implemented in DynamicEstimator, and KalmanFilter.
Member Data Documentation
DVector Estimator::p [protected] |
Estimated parameters.
Definition at line 161 of file estimator.hpp.
DVector Estimator::u [protected] |
Estimated previous controls.
Definition at line 160 of file estimator.hpp.
DVector Estimator::w [protected] |
Estimated disturbances.
Definition at line 162 of file estimator.hpp.
DVector Estimator::x [protected] |
Estimated differential state.
Definition at line 158 of file estimator.hpp.
DVector Estimator::xa [protected] |
Estimated algebraic state.
Definition at line 159 of file estimator.hpp.
The documentation for this class was generated from the following files: