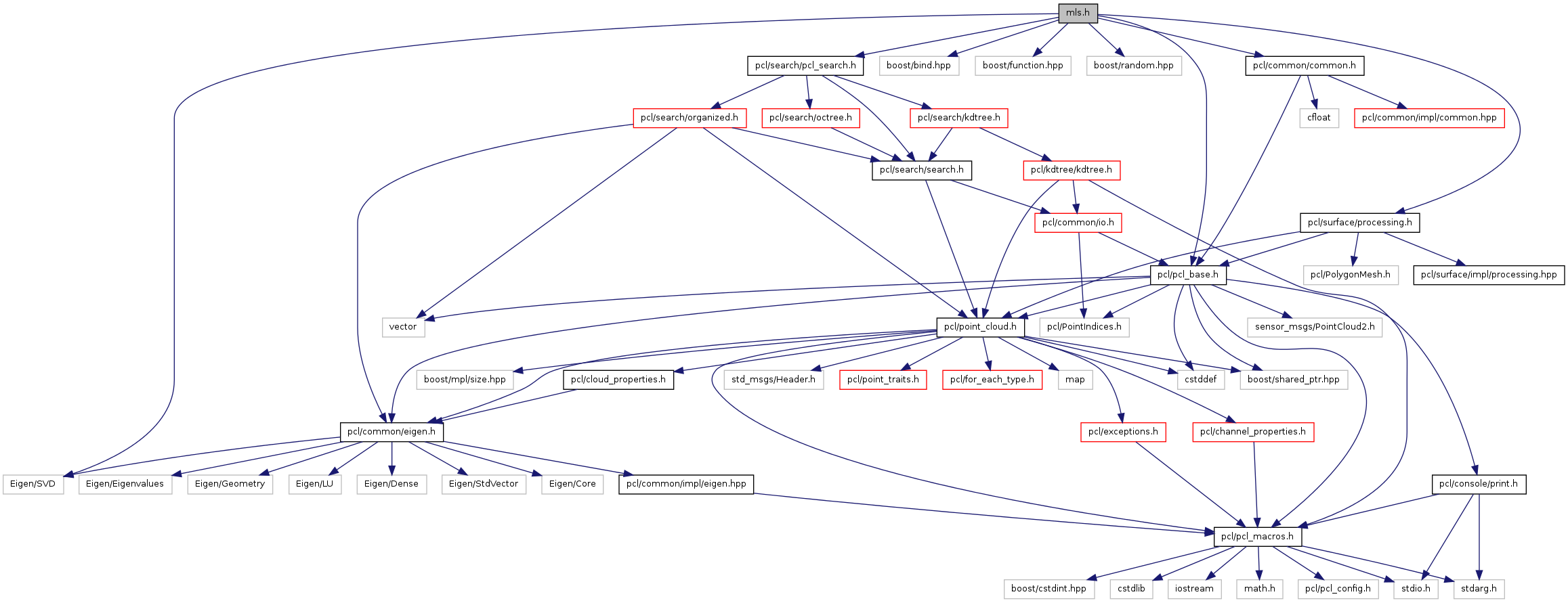
#include <pcl/pcl_base.h>#include <boost/bind.hpp>#include <boost/function.hpp>#include <boost/random.hpp>#include <pcl/search/pcl_search.h>#include <pcl/common/common.h>#include <pcl/surface/processing.h>#include <Eigen/SVD>
Include dependency graph for mls.h:
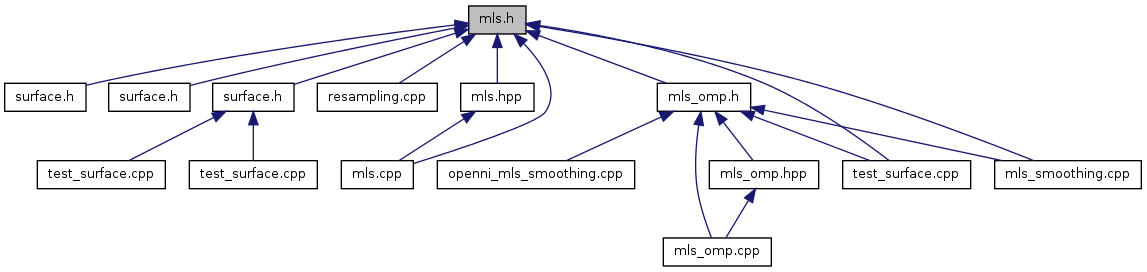
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | pcl::MovingLeastSquares< PointInT, PointOutT >::MLSVoxelGrid::Leaf |
| struct | pcl::MovingLeastSquares< PointInT, PointOutT >::MLSResult |
| Data structure used to store the results of the MLS fitting. More... | |
| class | pcl::MovingLeastSquares< PointInT, PointOutT >::MLSVoxelGrid |
| A minimalistic implementation of a voxel grid, necessary for the point cloud upsampling. More... | |
| class | pcl::MovingLeastSquares< PointInT, PointOutT > |
| MovingLeastSquares represent an implementation of the MLS (Moving Least Squares) algorithm for data smoothing and improved normal estimation. It also contains methods for upsampling the resulting cloud based on the parametric fit. Reference paper: "Computing and Rendering Point Set Surfaces" by Marc Alexa, Johannes Behr, Daniel Cohen-Or, Shachar Fleishman, David Levin and Claudio T. Silva www.sci.utah.edu/~shachar/Publications/crpss.pdf. More... | |
Namespaces | |
| namespace | pcl |