SampleConsensusInitialAlignment is an implementation of the initial alignment algorithm described in section IV of "Fast Point Feature Histograms (FPFH) for 3D Registration," Rusu et al. More...
#include <ia_ransac.h>
Classes | |
| class | ErrorFunctor |
| class | HuberPenalty |
| class | TruncatedError |
Public Types | |
| typedef pcl::PointCloud< FeatureT > | FeatureCloud |
| typedef FeatureCloud::ConstPtr | FeatureCloudConstPtr |
| typedef FeatureCloud::Ptr | FeatureCloudPtr |
| typedef KdTreeFLANN< FeatureT > ::Ptr | FeatureKdTreePtr |
| typedef Registration < PointSource, PointTarget > ::PointCloudSource | PointCloudSource |
| typedef PointCloudSource::ConstPtr | PointCloudSourceConstPtr |
| typedef PointCloudSource::Ptr | PointCloudSourcePtr |
| typedef Registration < PointSource, PointTarget > ::PointCloudTarget | PointCloudTarget |
| typedef PointIndices::ConstPtr | PointIndicesConstPtr |
| typedef PointIndices::Ptr | PointIndicesPtr |
Public Member Functions | |
| int | getCorrespondenceRandomness () |
| Get the number of neighbors used when selecting a random feature correspondence, as set by the user. | |
| boost::shared_ptr< ErrorFunctor > | getErrorFunction () |
| Get a shared pointer to the ErrorFunctor that is to be minimized. | |
| float | getMinSampleDistance () |
| Get the minimum distances between samples, as set by the user. | |
| int | getNumberOfSamples () |
| Get the number of samples to use during each iteration, as set by the user. | |
| FeatureCloudConstPtr const | getSourceFeatures () |
| Get a pointer to the source point cloud's features. | |
| FeatureCloudConstPtr const | getTargetFeatures () |
| Get a pointer to the target point cloud's features. | |
| SampleConsensusInitialAlignment () | |
| Constructor. | |
| void | setCorrespondenceRandomness (int k) |
| Set the number of neighbors to use when selecting a random feature correspondence. A higher value will add more randomness to the feature matching. | |
| void | setErrorFunction (const boost::shared_ptr< ErrorFunctor > &error_functor) |
| Specify the error function to minimize. | |
| void | setMinSampleDistance (float min_sample_distance) |
| Set the minimum distances between samples. | |
| void | setNumberOfSamples (int nr_samples) |
| Set the number of samples to use during each iteration. | |
| void | setSourceFeatures (const FeatureCloudConstPtr &features) |
| Provide a boost shared pointer to the source point cloud's feature descriptors. | |
| void | setTargetFeatures (const FeatureCloudConstPtr &features) |
| Provide a boost shared pointer to the target point cloud's feature descriptors. | |
Protected Member Functions | |
| float | computeErrorMetric (const PointCloudSource &cloud, float threshold) |
| An error metric for that computes the quality of the alignment between the given cloud and the target. | |
| virtual void | computeTransformation (PointCloudSource &output, const Eigen::Matrix4f &guess) |
| Rigid transformation computation method. | |
| void | findSimilarFeatures (const FeatureCloud &input_features, const std::vector< int > &sample_indices, std::vector< int > &corresponding_indices) |
| For each of the sample points, find a list of points in the target cloud whose features are similar to the sample points' features. From these, select one randomly which will be considered that sample point's correspondence. | |
| int | getRandomIndex (int n) |
| Choose a random index between 0 and n-1. | |
| void | selectSamples (const PointCloudSource &cloud, int nr_samples, float min_sample_distance, std::vector< int > &sample_indices) |
| Select nr_samples sample points from cloud while making sure that their pairwise distances are greater than a user-defined minimum distance, min_sample_distance. | |
Protected Attributes | |
| boost::shared_ptr< ErrorFunctor > | error_functor_ |
| FeatureKdTreePtr | feature_tree_ |
| The KdTree used to compare feature descriptors. | |
| FeatureCloudConstPtr | input_features_ |
| The source point cloud's feature descriptors. | |
| int | k_correspondences_ |
| The number of neighbors to use when selecting a random feature correspondence. | |
| float | min_sample_distance_ |
| The minimum distances between samples. | |
| int | nr_samples_ |
| The number of samples to use during each iteration. | |
| FeatureCloudConstPtr | target_features_ |
| The target point cloud's feature descriptors. | |
Detailed Description
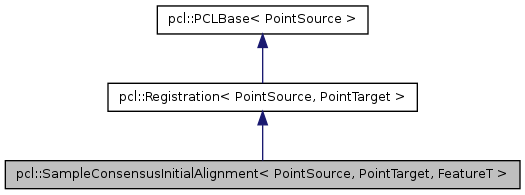
template<typename PointSource, typename PointTarget, typename FeatureT>
class pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >
SampleConsensusInitialAlignment is an implementation of the initial alignment algorithm described in section IV of "Fast Point Feature Histograms (FPFH) for 3D Registration," Rusu et al.
Definition at line 52 of file ia_ransac.h.
Member Typedef Documentation
| typedef pcl::PointCloud<FeatureT> pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::FeatureCloud |
Definition at line 77 of file ia_ransac.h.
| typedef FeatureCloud::ConstPtr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::FeatureCloudConstPtr |
Definition at line 79 of file ia_ransac.h.
| typedef FeatureCloud::Ptr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::FeatureCloudPtr |
Definition at line 78 of file ia_ransac.h.
| typedef KdTreeFLANN<FeatureT>::Ptr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::FeatureKdTreePtr |
Definition at line 125 of file ia_ransac.h.
| typedef Registration<PointSource, PointTarget>::PointCloudSource pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::PointCloudSource |
Reimplemented from pcl::Registration< PointSource, PointTarget >.
Definition at line 68 of file ia_ransac.h.
| typedef PointCloudSource::ConstPtr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::PointCloudSourceConstPtr |
Reimplemented from pcl::Registration< PointSource, PointTarget >.
Definition at line 70 of file ia_ransac.h.
| typedef PointCloudSource::Ptr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::PointCloudSourcePtr |
Reimplemented from pcl::Registration< PointSource, PointTarget >.
Definition at line 69 of file ia_ransac.h.
| typedef Registration<PointSource, PointTarget>::PointCloudTarget pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::PointCloudTarget |
Reimplemented from pcl::Registration< PointSource, PointTarget >.
Definition at line 72 of file ia_ransac.h.
| typedef PointIndices::ConstPtr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::PointIndicesConstPtr |
Reimplemented from pcl::PCLBase< PointSource >.
Definition at line 75 of file ia_ransac.h.
| typedef PointIndices::Ptr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::PointIndicesPtr |
Reimplemented from pcl::PCLBase< PointSource >.
Definition at line 74 of file ia_ransac.h.
Constructor & Destructor Documentation
| pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::SampleConsensusInitialAlignment | ( | ) | [inline] |
Constructor.
Definition at line 127 of file ia_ransac.h.
Member Function Documentation
| float pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::computeErrorMetric | ( | const PointCloudSource & | cloud, |
| float | threshold | ||
| ) | [protected] |
An error metric for that computes the quality of the alignment between the given cloud and the target.
- Parameters:
-
cloud the input cloud threshold distances greater than this value are capped
Definition at line 155 of file ia_ransac.hpp.
| void pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::computeTransformation | ( | PointCloudSource & | output, |
| const Eigen::Matrix4f & | guess | ||
| ) | [protected, virtual] |
Rigid transformation computation method.
- Parameters:
-
output the transformed input point cloud dataset using the rigid transformation found
Implements pcl::Registration< PointSource, PointTarget >.
Definition at line 177 of file ia_ransac.hpp.
| void pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::findSimilarFeatures | ( | const FeatureCloud & | input_features, |
| const std::vector< int > & | sample_indices, | ||
| std::vector< int > & | corresponding_indices | ||
| ) | [protected] |
For each of the sample points, find a list of points in the target cloud whose features are similar to the sample points' features. From these, select one randomly which will be considered that sample point's correspondence.
- Parameters:
-
input_features a cloud of feature descriptors sample_indices the indices of each sample point corresponding_indices the resulting indices of each sample's corresponding point in the target cloud
Definition at line 134 of file ia_ransac.hpp.
| int pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::getCorrespondenceRandomness | ( | ) | [inline] |
Get the number of neighbors used when selecting a random feature correspondence, as set by the user.
Definition at line 187 of file ia_ransac.h.
| boost::shared_ptr<ErrorFunctor> pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::getErrorFunction | ( | ) | [inline] |
Get a shared pointer to the ErrorFunctor that is to be minimized.
- Returns:
- A shared pointer to a subclass of SampleConsensusInitialAlignment::ErrorFunctor
Definition at line 200 of file ia_ransac.h.
| float pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::getMinSampleDistance | ( | ) | [inline] |
Get the minimum distances between samples, as set by the user.
Definition at line 166 of file ia_ransac.h.
| int pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::getNumberOfSamples | ( | ) | [inline] |
Get the number of samples to use during each iteration, as set by the user.
Definition at line 176 of file ia_ransac.h.
| int pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::getRandomIndex | ( | int | n | ) | [inline, protected] |
Choose a random index between 0 and n-1.
- Parameters:
-
n the number of possible indices to choose from
Definition at line 207 of file ia_ransac.h.
| FeatureCloudConstPtr const pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::getSourceFeatures | ( | ) | [inline] |
Get a pointer to the source point cloud's features.
Definition at line 146 of file ia_ransac.h.
| FeatureCloudConstPtr const pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::getTargetFeatures | ( | ) | [inline] |
Get a pointer to the target point cloud's features.
Definition at line 156 of file ia_ransac.h.
| void pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::selectSamples | ( | const PointCloudSource & | cloud, |
| int | nr_samples, | ||
| float | min_sample_distance, | ||
| std::vector< int > & | sample_indices | ||
| ) | [protected] |
Select nr_samples sample points from cloud while making sure that their pairwise distances are greater than a user-defined minimum distance, min_sample_distance.
- Parameters:
-
cloud the input point cloud nr_samples the number of samples to select min_sample_distance the minimum distance between any two samples sample_indices the resulting sample indices
Definition at line 72 of file ia_ransac.hpp.
| void pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::setCorrespondenceRandomness | ( | int | k | ) | [inline] |
Set the number of neighbors to use when selecting a random feature correspondence. A higher value will add more randomness to the feature matching.
- Parameters:
-
k the number of neighbors to use when selecting a random feature correspondence.
Definition at line 183 of file ia_ransac.h.
| void pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::setErrorFunction | ( | const boost::shared_ptr< ErrorFunctor > & | error_functor | ) | [inline] |
Specify the error function to minimize.
- Note:
- This call is optional. TruncatedError will be used by default
- Parameters:
-
[in] error_functor a shared pointer to a subclass of SampleConsensusInitialAlignment::ErrorFunctor
Definition at line 194 of file ia_ransac.h.
| void pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::setMinSampleDistance | ( | float | min_sample_distance | ) | [inline] |
Set the minimum distances between samples.
- Parameters:
-
min_sample_distance the minimum distances between samples
Definition at line 162 of file ia_ransac.h.
| void pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::setNumberOfSamples | ( | int | nr_samples | ) | [inline] |
Set the number of samples to use during each iteration.
- Parameters:
-
nr_samples the number of samples to use during each iteration
Definition at line 172 of file ia_ransac.h.
| void pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::setSourceFeatures | ( | const FeatureCloudConstPtr & | features | ) |
Provide a boost shared pointer to the source point cloud's feature descriptors.
- Parameters:
-
features the source point cloud's features
Definition at line 47 of file ia_ransac.hpp.
| void pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::setTargetFeatures | ( | const FeatureCloudConstPtr & | features | ) |
Provide a boost shared pointer to the target point cloud's feature descriptors.
- Parameters:
-
features the target point cloud's features
Definition at line 59 of file ia_ransac.hpp.
Member Data Documentation
boost::shared_ptr<ErrorFunctor> pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::error_functor_ [protected] |
Definition at line 263 of file ia_ransac.h.
FeatureKdTreePtr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::feature_tree_ [protected] |
The KdTree used to compare feature descriptors.
Definition at line 260 of file ia_ransac.h.
FeatureCloudConstPtr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::input_features_ [protected] |
The source point cloud's feature descriptors.
Definition at line 245 of file ia_ransac.h.
int pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::k_correspondences_ [protected] |
The number of neighbors to use when selecting a random feature correspondence.
Definition at line 257 of file ia_ransac.h.
float pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::min_sample_distance_ [protected] |
The minimum distances between samples.
Definition at line 254 of file ia_ransac.h.
int pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::nr_samples_ [protected] |
The number of samples to use during each iteration.
Definition at line 251 of file ia_ransac.h.
FeatureCloudConstPtr pcl::SampleConsensusInitialAlignment< PointSource, PointTarget, FeatureT >::target_features_ [protected] |
The target point cloud's feature descriptors.
Definition at line 248 of file ia_ransac.h.
The documentation for this class was generated from the following files: