MomentInvariantsEstimation estimates the 3 moment invariants (j1, j2, j3) at each 3D point. More...
#include <moment_invariants.h>
Public Types | |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
Public Member Functions | |
| void | computePointMomentInvariants (const pcl::PointCloud< PointInT > &cloud, const std::vector< int > &indices, float &j1, float &j2, float &j3) |
| Compute the 3 moment invariants (j1, j2, j3) for a given set of points, using their indices. | |
| void | computePointMomentInvariants (const pcl::PointCloud< PointInT > &cloud, float &j1, float &j2, float &j3) |
| Compute the 3 moment invariants (j1, j2, j3) for a given set of points, using their indices. | |
| MomentInvariantsEstimation () | |
| Empty constructor. | |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate moment invariants for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod () | |
Private Member Functions | |
| void | computeFeatureEigen (pcl::PointCloud< Eigen::MatrixXf > &) |
| Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class. | |
Private Attributes | |
| Eigen::Vector4f | temp_pt_ |
| Internal data vector. | |
| Eigen::Vector4f | xyz_centroid_ |
| 16-bytes aligned placeholder for the XYZ centroid of a surface patch. | |
Detailed Description
template<typename PointInT, typename PointOutT>
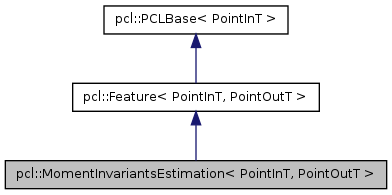
class pcl::MomentInvariantsEstimation< PointInT, PointOutT >
MomentInvariantsEstimation estimates the 3 moment invariants (j1, j2, j3) at each 3D point.
- Note:
- The code is stateful as we do not expect this class to be multicore parallelized. Please look at NormalEstimationOMP for an example on how to extend this to parallel implementations.
Definition at line 55 of file moment_invariants.h.
Member Typedef Documentation
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::MomentInvariantsEstimation< PointInT, PointOutT >::PointCloudOut |
Reimplemented from pcl::Feature< PointInT, PointOutT >.
Definition at line 66 of file moment_invariants.h.
Constructor & Destructor Documentation
| pcl::MomentInvariantsEstimation< PointInT, PointOutT >::MomentInvariantsEstimation | ( | ) | [inline] |
Empty constructor.
Definition at line 69 of file moment_invariants.h.
Member Function Documentation
| void pcl::MomentInvariantsEstimation< PointInT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Estimate moment invariants for all points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ()
- Parameters:
-
[out] output the resultant point cloud model dataset that contains the moment invariants
Implements pcl::Feature< PointInT, PointOutT >.
Definition at line 114 of file moment_invariants.hpp.
| void pcl::MomentInvariantsEstimation< PointInT, PointOutT >::computeFeatureEigen | ( | pcl::PointCloud< Eigen::MatrixXf > & | ) | [inline, private, virtual] |
Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class.
- Parameters:
-
[out] output the output point cloud
Implements pcl::Feature< PointInT, PointOutT >.
Reimplemented in pcl::MomentInvariantsEstimation< PointInT, Eigen::MatrixXf >.
Definition at line 116 of file moment_invariants.h.
| void pcl::MomentInvariantsEstimation< PointInT, PointOutT >::computePointMomentInvariants | ( | const pcl::PointCloud< PointInT > & | cloud, |
| const std::vector< int > & | indices, | ||
| float & | j1, | ||
| float & | j2, | ||
| float & | j3 | ||
| ) |
Compute the 3 moment invariants (j1, j2, j3) for a given set of points, using their indices.
- Parameters:
-
[in] cloud the input point cloud [in] indices the point cloud indices that need to be used [out] j1 the resultant first moment invariant [out] j2 the resultant second moment invariant [out] j3 the resultant third moment invariant
Definition at line 47 of file moment_invariants.hpp.
| void pcl::MomentInvariantsEstimation< PointInT, PointOutT >::computePointMomentInvariants | ( | const pcl::PointCloud< PointInT > & | cloud, |
| float & | j1, | ||
| float & | j2, | ||
| float & | j3 | ||
| ) |
Compute the 3 moment invariants (j1, j2, j3) for a given set of points, using their indices.
- Parameters:
-
[in] cloud the input point cloud [out] j1 the resultant first moment invariant [out] j2 the resultant second moment invariant [out] j3 the resultant third moment invariant
Definition at line 81 of file moment_invariants.hpp.
Member Data Documentation
Eigen::Vector4f pcl::MomentInvariantsEstimation< PointInT, PointOutT >::temp_pt_ [private] |
Internal data vector.
Definition at line 110 of file moment_invariants.h.
Eigen::Vector4f pcl::MomentInvariantsEstimation< PointInT, PointOutT >::xyz_centroid_ [private] |
16-bytes aligned placeholder for the XYZ centroid of a surface patch.
Definition at line 107 of file moment_invariants.h.
The documentation for this class was generated from the following files: