#include <approach_lift_grasp.h>
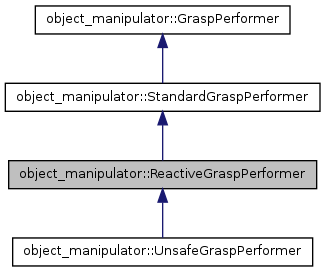
Inheritance diagram for object_manipulator::ReactiveGraspPerformer:
Protected Member Functions | |
| virtual object_manipulation_msgs::GraspResult | approachAndGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal, const manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
| virtual object_manipulation_msgs::GraspResult | lift (const object_manipulation_msgs::PickupGoal &pickup_goal, const manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
| virtual object_manipulation_msgs::GraspResult | nonReactiveLift (const object_manipulation_msgs::PickupGoal &pickup_goal, const manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
| Open loop lift that just executes a pre-set trajectory. | |
| virtual object_manipulation_msgs::GraspResult | reactiveLift (const object_manipulation_msgs::PickupGoal &pickup_goal, const manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
| Lifting based on fingertip forces. | |
Detailed Description
Uses reactive grasping instead of executing approach trajectory, then computes a new lift trajectory from wherever reactive grasping ends up.
Definition at line 240 of file approach_lift_grasp.h.
Member Function Documentation
| object_manipulation_msgs::GraspResult object_manipulator::ReactiveGraspPerformer::approachAndGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const manipulation_msgs::Grasp & | grasp, | ||
| GraspExecutionInfo & | execution_info | ||
| ) | [protected, virtual] |
Reimplemented from object_manipulator::StandardGraspPerformer.
Reimplemented in object_manipulator::UnsafeGraspPerformer.
Definition at line 602 of file approach_lift_grasp.cpp.
| object_manipulation_msgs::GraspResult object_manipulator::ReactiveGraspPerformer::lift | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const manipulation_msgs::Grasp & | grasp, | ||
| GraspExecutionInfo & | execution_info | ||
| ) | [protected, virtual] |
Reimplemented from object_manipulator::StandardGraspPerformer.
Definition at line 587 of file approach_lift_grasp.cpp.
| object_manipulation_msgs::GraspResult object_manipulator::ReactiveGraspPerformer::nonReactiveLift | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const manipulation_msgs::Grasp & | grasp, | ||
| GraspExecutionInfo & | execution_info | ||
| ) | [protected, virtual] |
Open loop lift that just executes a pre-set trajectory.
Definition at line 507 of file approach_lift_grasp.cpp.
| object_manipulation_msgs::GraspResult object_manipulator::ReactiveGraspPerformer::reactiveLift | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const manipulation_msgs::Grasp & | grasp, | ||
| GraspExecutionInfo & | execution_info | ||
| ) | [protected, virtual] |
Lifting based on fingertip forces.
Definition at line 557 of file approach_lift_grasp.cpp.
The documentation for this class was generated from the following files: