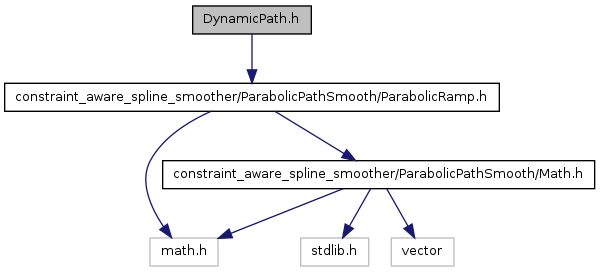
Include dependency graph for DynamicPath.h:
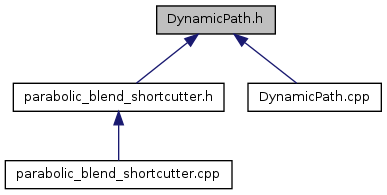
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ParabolicRamp::DistanceCheckerBase |
| A base class for a distance checker. ObstacleDistance returns the radius of a L-z norm guaranteed to be collision-free. ObstacleDistanceNorm returns the value of z. More... | |
| class | ParabolicRamp::DynamicPath |
| A bounded-velocity, bounded-acceleration trajectory consisting of parabolic ramps. More... | |
| class | ParabolicRamp::FeasibilityCheckerBase |
| A base class for a feasibility checker. More... | |
| class | ParabolicRamp::RampFeasibilityChecker |
| A class that encapsulates feaibility checking of a ParabolicRampND. More... | |
| class | ParabolicRamp::RandomNumberGeneratorBase |
| A custom random number generator that can be provided to DynamicPath::Shortcut() More... | |
Namespaces | |
| namespace | ParabolicRamp |
Functions | |
| bool | ParabolicRamp::CheckRamp (const ParabolicRampND &ramp, FeasibilityCheckerBase *feas, DistanceCheckerBase *distance, int maxiters) |
| Checks whether the ramp is feasible using exact checking. | |
| bool | ParabolicRamp::CheckRamp (const ParabolicRampND &ramp, FeasibilityCheckerBase *space, Real tol) |