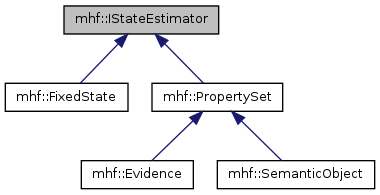
Base class for all state estimators used by the world model. More...
#include <IStateEstimator.h>
Public Member Functions | |
| virtual IStateEstimator * | clone () const =0 |
| virtual const pbl::PDF & | getValue () const =0 |
| Returns the current estimated state value. | |
| virtual void | propagate (const Time &time)=0 |
| Propagates the internal state to Time time. | |
| virtual void | reset ()=0 |
| Resets the internal state of the estimator to its initial value. | |
| virtual bool | setParameter (const std::string ¶m, bool b) |
| Resets the internal state of the estimator to the given PDF. | |
| virtual bool | setParameter (const std::string ¶m, double v) |
| Set a real-valued parameter of this state estimator. | |
| virtual bool | setParameter (const std::string ¶m, const std::string &s) |
| Set a string parameter of this state estimator. | |
| virtual void | update (const pbl::PDF &z, const Time &time)=0 |
| Updates the internal state based on measurement z. | |
| virtual | ~IStateEstimator () |
Detailed Description
Base class for all state estimators used by the world model.
- Date:
- December, 2012
A state estimator estimates the value of one specific attribute of one specific object in the world. The attribute value is represented by a probability density over the domain of the attribute. For example, a position can be represented by a PDF over Cartesian space. A state estimator should implement three methods: propagate(Time t), which changes the internal state of the estimator to the estimated value at Time t; update(PDF z, Time time) which updates the internal state based on measurement z at Time t; and getValue() which returns the current state.
Definition at line 61 of file IStateEstimator.h.
Constructor & Destructor Documentation
| virtual mhf::IStateEstimator::~IStateEstimator | ( | ) | [inline, virtual] |
Definition at line 65 of file IStateEstimator.h.
Member Function Documentation
| virtual IStateEstimator* mhf::IStateEstimator::clone | ( | ) | const [pure virtual] |
Implemented in mhf::SemanticObject, mhf::FixedState, and mhf::PropertySet.
| virtual const pbl::PDF& mhf::IStateEstimator::getValue | ( | ) | const [pure virtual] |
Returns the current estimated state value.
- Returns:
- The current state, i.e., the current attribute value represented as probability density function
Implemented in mhf::FixedState, and mhf::PropertySet.
| virtual void mhf::IStateEstimator::propagate | ( | const Time & | time | ) | [pure virtual] |
Propagates the internal state to Time time.
- Parameters:
-
time The time to which the internal state is propagated
Implemented in mhf::FixedState, and mhf::PropertySet.
| virtual void mhf::IStateEstimator::reset | ( | ) | [pure virtual] |
Resets the internal state of the estimator to its initial value.
Implemented in mhf::FixedState, and mhf::PropertySet.
| virtual bool mhf::IStateEstimator::setParameter | ( | const std::string & | param, |
| bool | b | ||
| ) | [inline, virtual] |
Resets the internal state of the estimator to the given PDF.
- Parameters:
-
pdf The value to which the internal state is set Set a boolean parameter of this state estimator param The parameter name b The boolean value
- Returns:
- Returns true if the parameter was known to the estimator; false otherwise
Definition at line 106 of file IStateEstimator.h.
| virtual bool mhf::IStateEstimator::setParameter | ( | const std::string & | param, |
| double | v | ||
| ) | [inline, virtual] |
Set a real-valued parameter of this state estimator.
- Parameters:
-
param The parameter name v The float value
- Returns:
- Returns true if the parameter was known to the estimator; false otherwise
Definition at line 116 of file IStateEstimator.h.
| virtual bool mhf::IStateEstimator::setParameter | ( | const std::string & | param, |
| const std::string & | s | ||
| ) | [inline, virtual] |
Set a string parameter of this state estimator.
- Parameters:
-
param The parameter name s The string value
- Returns:
- Returns true if the parameter was known to the estimator; false otherwise
Definition at line 126 of file IStateEstimator.h.
| virtual void mhf::IStateEstimator::update | ( | const pbl::PDF & | z, |
| const Time & | time | ||
| ) | [pure virtual] |
Updates the internal state based on measurement z.
- Parameters:
-
z The measurement with which to update, represented as a probability density function time The time to which the internal state is propagated before updating
Implemented in mhf::PropertySet, and mhf::FixedState.
The documentation for this class was generated from the following file: