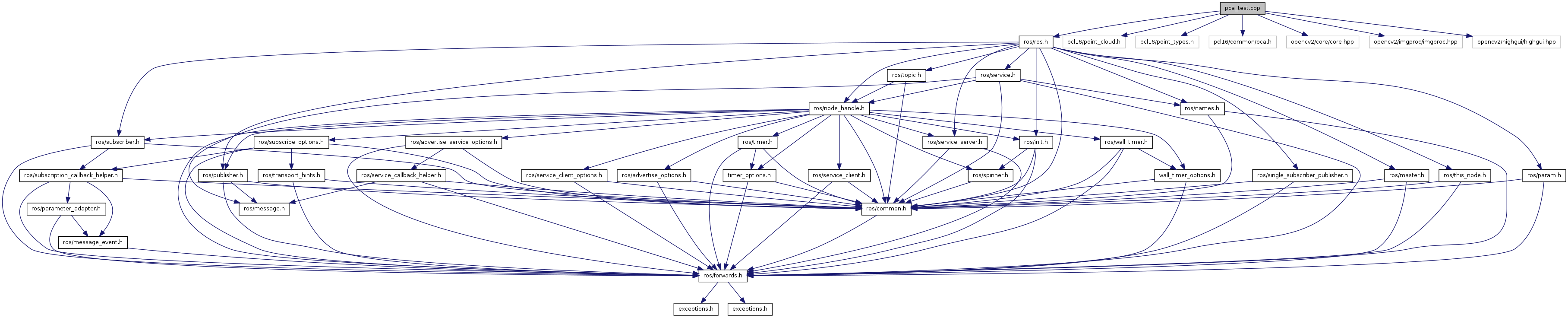
#include <ros/ros.h>#include <pcl16/point_cloud.h>#include <pcl16/point_types.h>#include <pcl16/common/pca.h>#include <opencv2/core/core.hpp>#include <opencv2/imgproc/imgproc.hpp>#include <opencv2/highgui/highgui.hpp>
Include dependency graph for pca_test.cpp:
Go to the source code of this file.
Typedefs | |
| typedef pcl16::PointCloud < pcl16::PointXYZ > | XYZPointCloud |
Functions | |
| cv::RotatedRect | fit2DMassEllipse (XYZPointCloud &obj_cloud) |
| int | main () |
Typedef Documentation
| typedef pcl16::PointCloud<pcl16::PointXYZ> XYZPointCloud |
Definition at line 10 of file pca_test.cpp.
Function Documentation
| cv::RotatedRect fit2DMassEllipse | ( | XYZPointCloud & | obj_cloud | ) |
Definition at line 12 of file pca_test.cpp.
| int main | ( | ) |
Definition at line 68 of file pca_test.cpp.