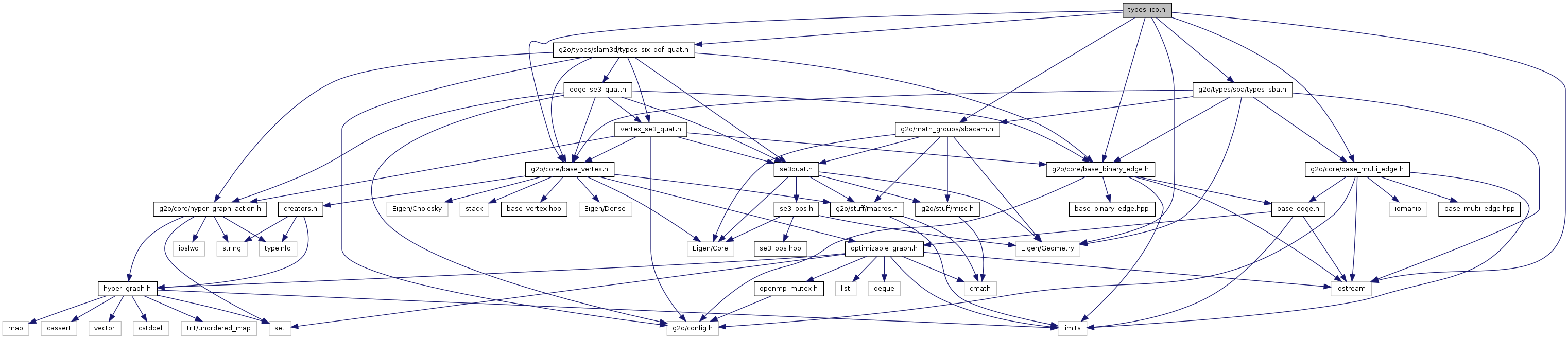
#include "g2o/core/base_vertex.h"#include "g2o/core/base_binary_edge.h"#include "g2o/core/base_multi_edge.h"#include "g2o/math_groups/sbacam.h"#include "g2o/types/sba/types_sba.h"#include "g2o/types/slam3d/types_six_dof_quat.h"#include <Eigen/Geometry>#include <iostream>
Include dependency graph for types_icp.h:
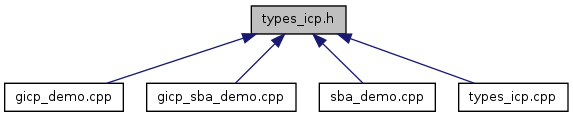
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | g2o::Edge_V_V_GICP |
| class | g2o::Edge_XYZ_VSC |
| Point vertex, XYZ, is in types_sba. More... | |
| class | g2o::EdgeGICP |
| class | g2o::VertexSCam |
| Stereo camera vertex, derived from SE3 class. Note that we use the actual pose of the vertex as its parameterization, rather than the transform from RW to camera coords. Uses static vars for camera params, so there is a single camera setup. More... | |
Namespaces | |
| namespace | g2o |
Executes code, only if secs are gone since last exec. | |
Defines | |
| #define | GICP_ANALYTIC_JACOBIANS |
Define Documentation
| #define GICP_ANALYTIC_JACOBIANS |
Definition at line 20 of file types_icp.h.