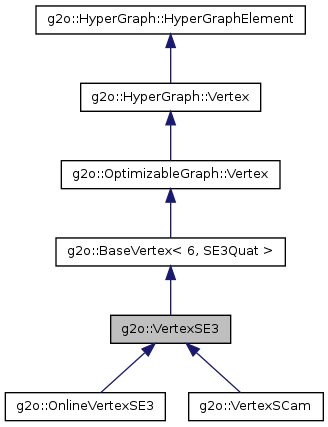
3D pose Vertex, (x,y,z,qw,qx,qy,qz) the parameterization for the increments constructed is a 6d vector (x,y,z,qx,qy,qz) (note that we leave out the w part of the quaternion. More...
#include <vertex_se3_quat.h>
Public Member Functions | |
| virtual int | estimateDimension () const |
| virtual bool | getEstimateData (double *est) const |
| virtual bool | getMinimalEstimateData (double *est) const |
| virtual int | minimalEstimateDimension () const |
| virtual void | oplus (double *update) |
| update the position of the node from the parameters in v | |
| virtual bool | read (std::istream &is) |
| read the vertex from a stream, i.e., the internal state of the vertex | |
| virtual bool | setEstimateData (const double *est) |
| virtual bool | setMinimalEstimateData (const double *est) |
| virtual void | setToOrigin () |
| sets the node to the origin (used in the multilevel stuff) | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | VertexSE3 () |
| virtual bool | write (std::ostream &os) const |
| write the vertex to a stream | |
Detailed Description
3D pose Vertex, (x,y,z,qw,qx,qy,qz) the parameterization for the increments constructed is a 6d vector (x,y,z,qx,qy,qz) (note that we leave out the w part of the quaternion.
Definition at line 33 of file vertex_se3_quat.h.
Constructor & Destructor Documentation
Definition at line 32 of file vertex_se3_quat.cpp.
Member Function Documentation
| virtual int g2o::VertexSE3::estimateDimension | ( | ) | const [inline, virtual] |
returns the dimension of the extended representation used by get/setEstimate(double*) -1 if it is not supported
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 62 of file vertex_se3_quat.h.
| virtual bool g2o::VertexSE3::getEstimateData | ( | double * | estimate | ) | const [inline, virtual] |
writes the estimater to an array of double
- Returns:
- true on success
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 55 of file vertex_se3_quat.h.
| virtual bool g2o::VertexSE3::getMinimalEstimateData | ( | double * | estimate | ) | const [inline, virtual] |
writes the estimater to an array of double
- Returns:
- true on success
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 72 of file vertex_se3_quat.h.
| virtual int g2o::VertexSE3::minimalEstimateDimension | ( | ) | const [inline, virtual] |
returns the dimension of the extended representation used by get/setEstimate(double*) -1 if it is not supported
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 78 of file vertex_se3_quat.h.
| virtual void g2o::VertexSE3::oplus | ( | double * | v | ) | [inline, virtual] |
update the position of the node from the parameters in v
Implements g2o::OptimizableGraph::Vertex.
Reimplemented in g2o::VertexSCam, and g2o::OnlineVertexSE3.
Definition at line 82 of file vertex_se3_quat.h.
| bool g2o::VertexSE3::read | ( | std::istream & | is | ) | [virtual] |
read the vertex from a stream, i.e., the internal state of the vertex
Implements g2o::OptimizableGraph::Vertex.
Reimplemented in g2o::VertexSCam.
Definition at line 37 of file vertex_se3_quat.cpp.
| virtual bool g2o::VertexSE3::setEstimateData | ( | const double * | estimate | ) | [inline, virtual] |
sets the initial estimate from an array of double
- Returns:
- true on success
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 47 of file vertex_se3_quat.h.
| virtual bool g2o::VertexSE3::setMinimalEstimateData | ( | const double * | estimate | ) | [inline, virtual] |
sets the initial estimate from an array of double
- Returns:
- true on success
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 66 of file vertex_se3_quat.h.
| virtual void g2o::VertexSE3::setToOrigin | ( | ) | [inline, virtual] |
sets the node to the origin (used in the multilevel stuff)
Implements g2o::OptimizableGraph::Vertex.
Definition at line 39 of file vertex_se3_quat.h.
| bool g2o::VertexSE3::write | ( | std::ostream & | os | ) | const [virtual] |
write the vertex to a stream
Implements g2o::OptimizableGraph::Vertex.
Reimplemented in g2o::VertexSCam.
Definition at line 45 of file vertex_se3_quat.cpp.
The documentation for this class was generated from the following files: