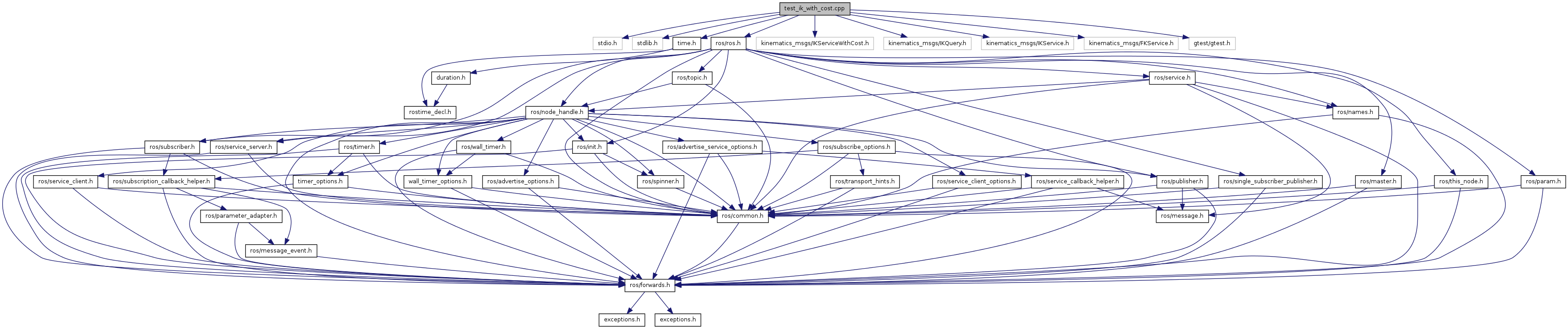
#include <stdio.h>#include <stdlib.h>#include <time.h>#include <ros/ros.h>#include <kinematics_msgs/IKServiceWithCost.h>#include <kinematics_msgs/IKQuery.h>#include <kinematics_msgs/IKService.h>#include <kinematics_msgs/FKService.h>#include <gtest/gtest.h>
Include dependency graph for test_ik_with_cost.cpp:
Go to the source code of this file.
Defines | |
| #define | IK_NEAR 1e-4 |
| #define | IK_NEAR_TRANSLATE 1e-5 |
Functions | |
| double | gen_rand (double min, double max) |
| int | main (int argc, char **argv) |
| bool | NOT_NEAR (const double &v1, const double &v2, const double &NEAR) |
| void | test () |
Variables | |
| static const std::string | ARM_FK_NAME = "/pr2_ik_right_arm/fk_service" |
| static const std::string | ARM_IK_NAME = "/pr2_ik_right_arm/ik_with_cost_service" |
| static const std::string | ARM_QUERY_NAME = "/pr2_ik_right_arm/ik_query" |
| static const int | NUM_TESTS = 1000 |
Define Documentation
| #define IK_NEAR 1e-4 |
Definition at line 46 of file test_ik_with_cost.cpp.
| #define IK_NEAR_TRANSLATE 1e-5 |
Definition at line 47 of file test_ik_with_cost.cpp.
Function Documentation
| double gen_rand | ( | double | min, |
| double | max | ||
| ) |
Definition at line 55 of file test_ik_with_cost.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 121 of file test_ik_with_cost.cpp.
Definition at line 62 of file test_ik_with_cost.cpp.
| void test | ( | ) |
Definition at line 69 of file test_ik_with_cost.cpp.
Variable Documentation
const std::string ARM_FK_NAME = "/pr2_ik_right_arm/fk_service" [static] |
Definition at line 49 of file test_ik_with_cost.cpp.
const std::string ARM_IK_NAME = "/pr2_ik_right_arm/ik_with_cost_service" [static] |
Definition at line 50 of file test_ik_with_cost.cpp.
const std::string ARM_QUERY_NAME = "/pr2_ik_right_arm/ik_query" [static] |
Definition at line 51 of file test_ik_with_cost.cpp.
const int NUM_TESTS = 1000 [static] |
Definition at line 53 of file test_ik_with_cost.cpp.