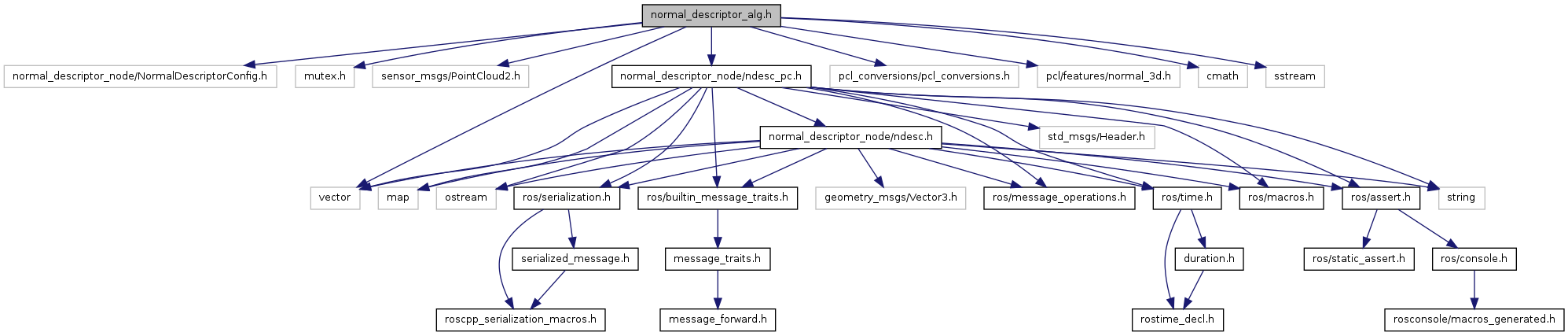
#include <normal_descriptor_node/NormalDescriptorConfig.h>#include "mutex.h"#include <sensor_msgs/PointCloud2.h>#include <normal_descriptor_node/ndesc_pc.h>#include <pcl_conversions/pcl_conversions.h>#include <pcl/features/normal_3d.h>#include <cmath>#include <vector>#include <sstream>
Include dependency graph for normal_descriptor_alg.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | NormalDescriptorAlgorithm |
| IRI ROS Specific Driver Class. More... | |
Functions | |
| template<class T > | |
| std::string | to_string (const T &t) |
Function Documentation
template<class T >
| std::string to_string | ( | const T & | t | ) | [inline] |
Definition at line 42 of file normal_descriptor_alg.h.