Holds the default configuration of the finger used in ICR::FingerParameters. More...
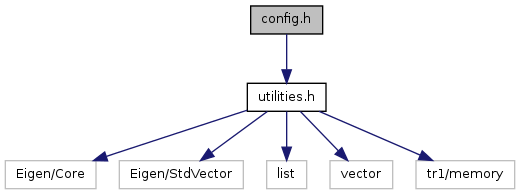
#include "utilities.h"
Include dependency graph for config.h:
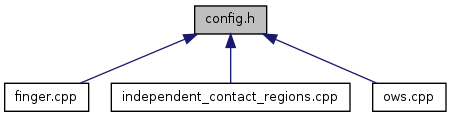
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Defines | |
| #define | DEFAULT_CONTACT_MODEL_TYPE Single_Point |
| #define | DEFAULT_CONTACT_TYPE Frictional |
| #define | DEFAULT_DISC 8 |
| #define | DEFAULT_FORCE_MAGNITUDE 1 |
| #define | DEFAULT_INCLUSION_RULE_FILTER_INSIDE_POINTS false |
| #define | DEFAULT_INCLUSION_RULE_PARAMETER 10 |
| #define | DEFAULT_INCLUSION_RULE_TYPE Sphere |
| #define | DEFAULT_MU_0 0.5 |
| #define | DEFAULT_MU_T 0.5 |
| #define | DIVIDE_OWS_BY_LAMBDA |
| #define | MULTITHREAD_ICR_COMPUTATION |
Detailed Description
Holds the default configuration of the finger used in ICR::FingerParameters.
Definition in file config.h.
Define Documentation
| #define DEFAULT_CONTACT_MODEL_TYPE Single_Point |
| #define DEFAULT_CONTACT_TYPE Frictional |
| #define DEFAULT_DISC 8 |
| #define DEFAULT_FORCE_MAGNITUDE 1 |
| #define DEFAULT_INCLUSION_RULE_FILTER_INSIDE_POINTS false |
| #define DEFAULT_INCLUSION_RULE_PARAMETER 10 |
| #define DEFAULT_INCLUSION_RULE_TYPE Sphere |
| #define DEFAULT_MU_0 0.5 |
| #define DEFAULT_MU_T 0.5 |
| #define DIVIDE_OWS_BY_LAMBDA |
| #define MULTITHREAD_ICR_COMPUTATION |