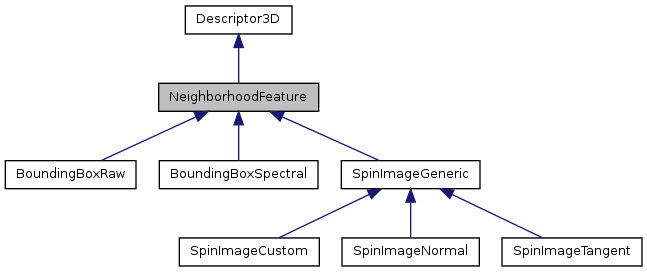
A NeighborhoodFeature is an abstract base class for descriptors that use a local neighborhood of points to compute features. More...
#include <neighborhood_feature.h>
Public Member Functions | |
| NeighborhoodFeature () | |
| Abstract constructor. | |
| virtual | ~NeighborhoodFeature ()=0 |
Protected Member Functions | |
| virtual void | computeNeighborhoodFeature (const sensor_msgs::PointCloud &data, const std::vector< int > &neighbor_indices, const unsigned int interest_sample_idx, std::vector< float > &result) const =0 |
| The prototype of the method that computes the features as defined in the inheriting class. | |
| virtual void | doComputation (const sensor_msgs::PointCloud &data, cloud_kdtree::KdTree &data_kdtree, const std::vector< const geometry_msgs::Point32 * > &interest_pts, std::vector< std::vector< float > > &results) |
| Retrieves the local neighborhood around each interest point and then computes features. | |
| virtual void | doComputation (const sensor_msgs::PointCloud &data, cloud_kdtree::KdTree &data_kdtree, const std::vector< const std::vector< int > * > &interest_region_indices, std::vector< std::vector< float > > &results) |
| Retrieves the local neighborhood around each interest region and then computes features. | |
Protected Attributes | |
| float | neighborhood_radius_ |
| The radius to define the bounding box. | |
| bool | neighborhood_radius_defined_ |
| Flag if neighborhood_radius_ has been defined. | |
A NeighborhoodFeature is an abstract base class for descriptors that use a local neighborhood of points to compute features.
Example: a spin image uses neighboring points to compute a histogram
Definition at line 69 of file neighborhood_feature.h.
Abstract constructor.
Definition at line 42 of file neighborhood_feature.cpp.
| NeighborhoodFeature::~NeighborhoodFeature | ( | ) | [pure virtual] |
Definition at line 51 of file neighborhood_feature.cpp.
| virtual void NeighborhoodFeature::computeNeighborhoodFeature | ( | const sensor_msgs::PointCloud & | data, |
| const std::vector< int > & | neighbor_indices, | ||
| const unsigned int | interest_sample_idx, | ||
| std::vector< float > & | result | ||
| ) | const [protected, pure virtual] |
The prototype of the method that computes the features as defined in the inheriting class.
| data | The overall point cloud data |
| neighbor_indices | List of indices in data that constitute the neighborhood |
| interest_sample_idx | The interest point/region that is being processed. |
| result | The vector to hold the resulting spin image feature vector |
Implemented in BoundingBoxSpectral, BoundingBoxRaw, and SpinImageGeneric.
| void NeighborhoodFeature::doComputation | ( | const sensor_msgs::PointCloud & | data, |
| cloud_kdtree::KdTree & | data_kdtree, | ||
| const std::vector< const geometry_msgs::Point32 * > & | interest_pts, | ||
| std::vector< std::vector< float > > & | results | ||
| ) | [protected, virtual] |
Retrieves the local neighborhood around each interest point and then computes features.
Implements Descriptor3D.
Definition at line 58 of file neighborhood_feature.cpp.
| virtual void NeighborhoodFeature::doComputation | ( | const sensor_msgs::PointCloud & | data, |
| cloud_kdtree::KdTree & | data_kdtree, | ||
| const std::vector< const std::vector< int > * > & | interest_region_indices, | ||
| std::vector< std::vector< float > > & | results | ||
| ) | [protected, virtual] |
Retrieves the local neighborhood around each interest region and then computes features.
Implements Descriptor3D.
float NeighborhoodFeature::neighborhood_radius_ [protected] |
The radius to define the bounding box.
Definition at line 126 of file neighborhood_feature.h.
Flag if neighborhood_radius_ has been defined.
Definition at line 129 of file neighborhood_feature.h.

