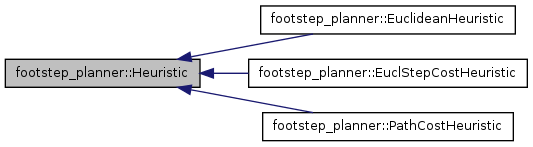
An abstract super class providing methods necessary to be used as heuristic function within the FootstepPlanner. More...
#include <Heuristic.h>
Public Types | |
| enum | HeuristicType { EUCLIDEAN = 0, EUCLIDEAN_STEPCOST = 1, PATH_COST = 2 } |
Public Member Functions | |
| HeuristicType | getHeuristicType () const |
| virtual double | getHValue (const PlanningState &from, const PlanningState &to) const =0 |
| Heuristic (double cell_size, int num_angle_bins, HeuristicType type) | |
| virtual | ~Heuristic () |
Protected Attributes | |
| double | ivCellSize |
| const HeuristicType | ivHeuristicType |
| int | ivNumAngleBins |
An abstract super class providing methods necessary to be used as heuristic function within the FootstepPlanner.
Definition at line 37 of file Heuristic.h.
Definition at line 40 of file Heuristic.h.
| footstep_planner::Heuristic::Heuristic | ( | double | cell_size, |
| int | num_angle_bins, | ||
| HeuristicType | type | ||
| ) |
Definition at line 28 of file Heuristic.cpp.
| footstep_planner::Heuristic::~Heuristic | ( | ) | [virtual] |
Definition at line 36 of file Heuristic.cpp.
| HeuristicType footstep_planner::Heuristic::getHeuristicType | ( | ) | const [inline] |
Definition at line 53 of file Heuristic.h.
| virtual double footstep_planner::Heuristic::getHValue | ( | const PlanningState & | from, |
| const PlanningState & | to | ||
| ) | const [pure virtual] |
Implemented in footstep_planner::EuclStepCostHeuristic, footstep_planner::EuclideanHeuristic, and footstep_planner::PathCostHeuristic.
double footstep_planner::Heuristic::ivCellSize [protected] |
Definition at line 53 of file Heuristic.h.
const HeuristicType footstep_planner::Heuristic::ivHeuristicType [protected] |
Definition at line 59 of file Heuristic.h.
int footstep_planner::Heuristic::ivNumAngleBins [protected] |
Definition at line 57 of file Heuristic.h.

