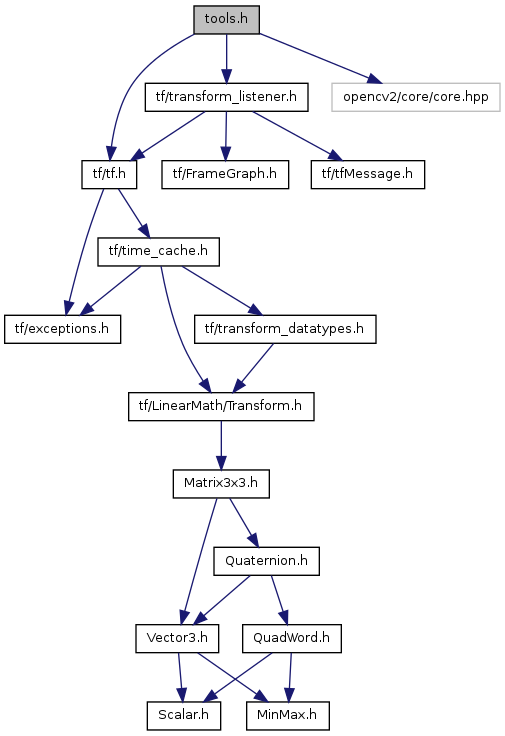
#include <tf/tf.h>
#include <tf/transform_listener.h>
#include <opencv2/core/core.hpp>
Go to the source code of this file.
Functions |
| void | computeCornersFromCell (const tf::Point center, const tf::Point v1, const tf::Point v2, tf::Point *rect_points) |
| void | computeCornersFromCell (const tf::Point center, const tf::Point v1, const tf::Point v2, std::vector< tf::Point > &rect_points) |
| void | computeRectPixel (const IplImage *ipl_image, const std::vector< cv::Point > &points, std::vector< cv::Point > &pixel) |
| void | computeRectPixel (const cv::Mat &image, const std::vector< cv::Point > &points, std::vector< cv::Point > &pixel) |
| bool | getTransform (const std::string &source, const std::string &target, tf::TransformListener &listener, tf::StampedTransform &transform) |
| bool | getTransform (const std::string &source, const std::string &target, tf::StampedTransform &transform) |
| bool | linePlaneIntersection (const cv::Point3d &plane_normal, const cv::Point3d &point_in_plane, const cv::Point3d &line_unit_vector, const cv::Point3d &line_origin, cv::Point3d &intersection) |
| float | mahalanobis (const cv::Mat &v1, const cv::Mat &v2, const cv::Mat &invCov) |
Function Documentation
| bool linePlaneIntersection |
( |
const cv::Point3d & |
plane_normal, |
|
|
const cv::Point3d & |
point_in_plane, |
|
|
const cv::Point3d & |
line_unit_vector, |
|
|
const cv::Point3d & |
line_origin, |
|
|
cv::Point3d & |
intersection |
|
) |
| |
| float mahalanobis |
( |
const cv::Mat & |
v1, |
|
|
const cv::Mat & |
v2, |
|
|
const cv::Mat & |
invCov |
|
) |
| |
- Author:
- Juergen Hess
Definition at line 15 of file tools.cpp.