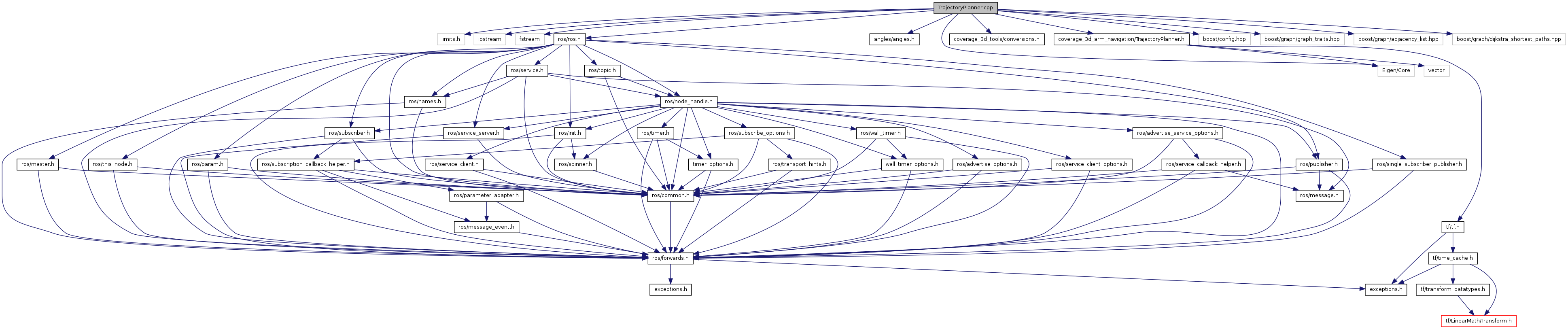
#include <limits.h>#include <iostream>#include <fstream>#include <ros/ros.h>#include <angles/angles.h>#include <Eigen/Core>#include <coverage_3d_tools/conversions.h>#include <coverage_3d_arm_navigation/TrajectoryPlanner.h>#include <boost/config.hpp>#include <boost/graph/graph_traits.hpp>#include <boost/graph/adjacency_list.hpp>#include <boost/graph/dijkstra_shortest_paths.hpp>