#include "LinearMath/btTransform.h"#include "LinearMath/btMotionState.h"#include "LinearMath/btAlignedAllocator.h"#include "LinearMath/btAlignedObjectArray.h"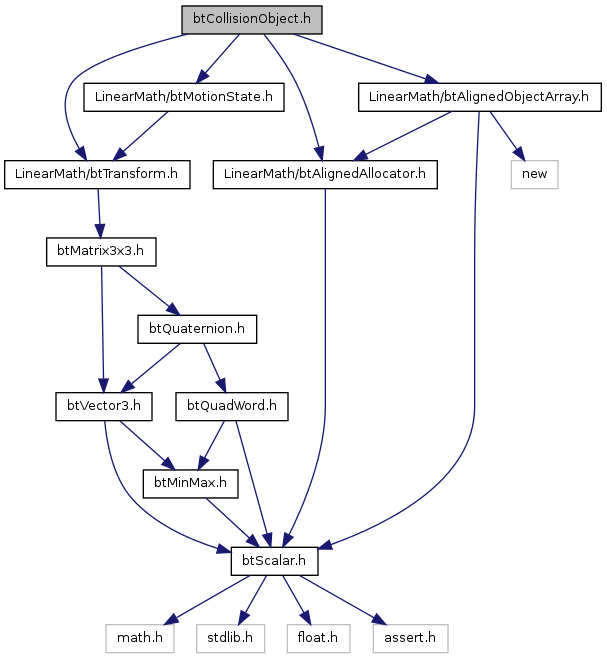
Go to the source code of this file.
Classes | |
| struct | btCollisionObjectDoubleData |
| do not change those serialization structures, it requires an updated sBulletDNAstr/sBulletDNAstr64 More... | |
| struct | btCollisionObjectFloatData |
| do not change those serialization structures, it requires an updated sBulletDNAstr/sBulletDNAstr64 More... | |
Defines | |
| #define | ACTIVE_TAG 1 |
| #define | btCollisionObjectData btCollisionObjectFloatData |
| #define | btCollisionObjectDataName "btCollisionObjectFloatData" |
| #define | DISABLE_DEACTIVATION 4 |
| #define | DISABLE_SIMULATION 5 |
| #define | ISLAND_SLEEPING 2 |
| #define | WANTS_DEACTIVATION 3 |
Typedefs | |
| typedef btAlignedObjectArray < class btCollisionObject * > | btCollisionObjectArray |
Functions | |
| ATTRIBUTE_ALIGNED16 (class) btCollisionObject | |
| #define ACTIVE_TAG 1 |
Definition at line 22 of file btCollisionObject.h.
Definition at line 41 of file btCollisionObject.h.
| #define btCollisionObjectDataName "btCollisionObjectFloatData" |
Definition at line 42 of file btCollisionObject.h.
| #define DISABLE_DEACTIVATION 4 |
Definition at line 25 of file btCollisionObject.h.
| #define DISABLE_SIMULATION 5 |
Definition at line 26 of file btCollisionObject.h.
| #define ISLAND_SLEEPING 2 |
Definition at line 23 of file btCollisionObject.h.
| #define WANTS_DEACTIVATION 3 |
Definition at line 24 of file btCollisionObject.h.
| typedef btAlignedObjectArray<class btCollisionObject*> btCollisionObjectArray |
Definition at line 30 of file btCollisionObject.h.
| ATTRIBUTE_ALIGNED16 | ( | class | ) |
btCollisionObject can be used to manage collision detection objects. btCollisionObject maintains all information that is needed for a collision detection: Shape, Transform and AABB proxy. They can be added to the btCollisionWorld.
m_interpolationWorldTransform is used for CCD and interpolation it can be either previous or future (predicted) transform
m_extensionPointer is used by some internal low-level Bullet extensions.
m_rootCollisionShape is temporarily used to store the original collision shape The m_collisionShape might be temporarily replaced by a child collision shape during collision detection purposes If it is NULL, the m_collisionShape is not temporarily replaced.
m_internalType is reserved to distinguish Bullet's btCollisionObject, btRigidBody, btSoftBody, btGhostObject etc. do not assign your own m_internalType unless you write a new dynamics object class.
users can point to their objects, m_userPointer is not used by Bullet, see setUserPointer/getUserPointer
time of impact calculation
Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm::
Don't do continuous collision detection if the motion (in one step) is less then m_ccdMotionThreshold
If some object should have elaborate collision filtering by sub-classes
CO_GHOST_OBJECT keeps track of all objects overlapping its AABB and that pass its collision filter It is useful for collision sensors, explosion objects, character controller etc.
static objects, kinematic and object without contact response don't merge islands
the constraint solver can discard solving contacts, if the distance is above this threshold. 0 by default. Note that using contacts with positive distance can improve stability. It increases, however, the chance of colliding with degerate contacts, such as 'interior' triangle edges
Avoid using this internal API call internalSetTemporaryCollisionShape is used to temporary replace the actual collision shape by a child collision shape.
Avoid using this internal API call, the extension pointer is used by some Bullet extensions. If you need to store your own user pointer, use 'setUserPointer/getUserPointer' instead.
Avoid using this internal API call, the extension pointer is used by some Bullet extensions If you need to store your own user pointer, use 'setUserPointer/getUserPointer' instead.
reserved for Bullet internal usage
Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm::
Swept sphere radius (0.0 by default), see btConvexConvexAlgorithm::
Don't do continuous collision detection if the motion (in one step) is less then m_ccdMotionThreshold
users can point to their objects, userPointer is not used by Bullet
users can point to their objects, userPointer is not used by Bullet
fills the dataBuffer and returns the struct name (and 0 on failure)
Definition at line 49 of file btCollisionObject.h.

