#include <vector>#include <string.h>#include "assert.h"#include "rpp/rpp.h"#include "rpp/rpp_const.h"#include "rpp/rpp_vecmat.h"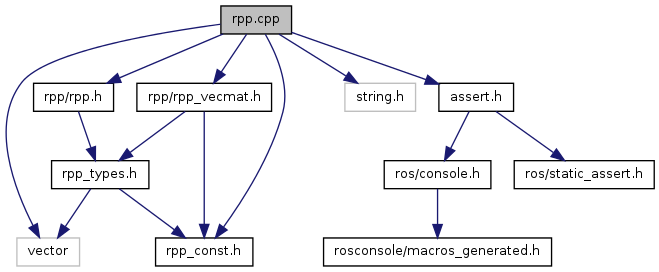
Go to the source code of this file.
Namespaces | |
| namespace | rpp |
Functions | |
| void | rpp::abskernel (mat33_t &R, vec3_t &t, vec3_array &Qout, real_t &err2, const vec3_array _P, const vec3_array _Q, const mat33_array F, const mat33_t G) |
| void | rpp::decomposeR (mat33_t &Rz, const mat33_t &R) |
| void | rpp::get2ndPose_Exact (pose_vec &sol, const vec3_array &v, const vec3_array &P, const mat33_t R, const vec3_t t, const real_t DB) |
| void | rpp::getRfor2ndPose_V_Exact (pose_vec &sol, const vec3_array &v, const vec3_array &P, const mat33_t R, const vec3_t t, const real_t DB) |
| void | rpp::GetRotationbyVector (mat33_t &R, const vec3_t &v1, const vec3_t &v2) |
| void | rpp::getRotationY_wrtT (scalar_array &al_ret, vec3_array &tnew, const vec3_array &v, const vec3_array &p, const vec3_t &t, const real_t &DB, const mat33_t &Rz) |
| void | rpp::objpose (mat33_t &R, vec3_t &t, unsigned int &it, real_t &obj_err, real_t &img_err, bool calc_img_err, const vec3_array _P, const vec3_array Qp, const options_t options) |
| void | rpp::Quaternion_byAngleAndVector (quat_t &Q, const real_t &q_angle, const vec3_t &q_vector) |
| void | rpp::robust_pose (real_t &err, mat33_t &R, vec3_t &t, const vec3_array &_model, const vec3_array &_iprts, const options_t _options) |
| void | rpp::rpyAng (vec3_t &angs, const mat33_t &R) |
| void | rpp::rpyAng_X (vec3_t &ang_zyx, const mat33_t &R) |
| void | rpp::rpyMat (mat33_t &R, const vec3_t &rpy) |
| void | rpp::xform (vec3_array &Q, const vec3_array &P, const mat33_t &R, const vec3_t &t) |
| void | rpp::xformproj (vec3_array &Qp, const vec3_array &P, const mat33_t &R, const vec3_t &t) |

