#include <art_msgs/ArtQuadrilateral.h>#include <art_msgs/ArtLanes.h>#include <art_map/PolyOps.h>#include <nav_msgs/Odometry.h>
Include dependency graph for QuadrilateralOps.h:

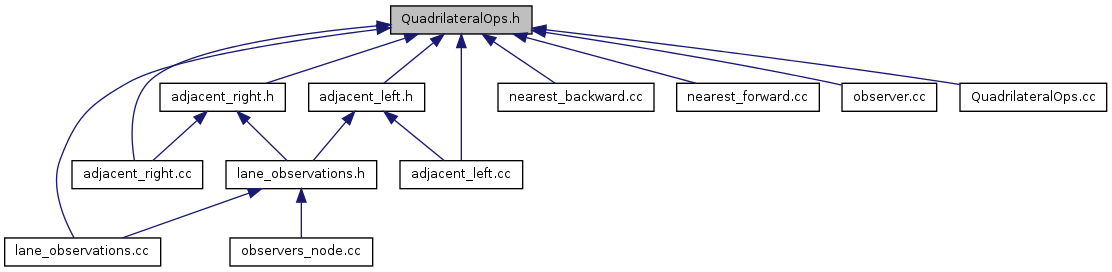
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | quad_ops::quad_less |
Namespaces | |
| namespace | quad_ops |
Typedefs | |
| typedef art_msgs::ArtQuadrilateral | quad_ops::Quad |
| shorter type name for ART quadrilateral message | |
Functions | |
| bool | quad_ops::compare_backward_seg_lane (const Quad &base, const Quad &comp) |
| bool | quad_ops::compare_forward_seg_lane (const Quad &base, const Quad &comp) |
| bool | quad_ops::compare_seg_lane (const Quad &base, const Quad &comp) |
| art_msgs::ArtLanes | quad_ops::filterAdjacentLanes (MapPose &pose, const art_msgs::ArtLanes &quads, const int lane) |
| art_msgs::ArtLanes | quad_ops::filterLanes (const Quad &base_quad, const art_msgs::ArtLanes &quads, bool(*filter)(const Quad &, const Quad &)) |
| bool | quad_ops::pointInHull (float x, float y, const geometry_msgs::Point32 *p1, const geometry_msgs::Point32 *p2, const geometry_msgs::Point32 *p3, const geometry_msgs::Point32 *p4) |
| bool | quad_ops::quickPointInPoly (float x, float y, const Quad &p) |
| bool | quad_ops::quickPointInPolyRatio (float x, float y, const Quad &p, float ratio) |
Detailed Description
ART observers Quadrilateral interfaces.
- Todo:
- Consider moving this to art_map.
Definition in file QuadrilateralOps.h.