Public Member Functions | |
| def | __init__ |
| def | canonicalizeWiistate |
| def | obtainWiimoteData |
Public Attributes | |
| angular_velocity_covariance | |
| freq | |
| gyroAbsence_covariance | |
| linear_acceleration_covariance | |
| sleepDuration | |
| wiiMote | |
| wiistate | |
Definition at line 149 of file wiimote_node.py.
| def wiimote_node::WiimoteDataSender::__init__ | ( | self, | ||
| wiiMote, | ||||
freq = 100 | ||||
| ) |
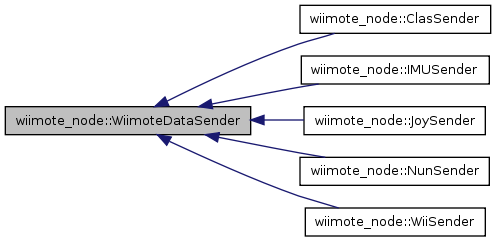
Reimplemented in wiimote_node::IMUSender, wiimote_node::JoySender, wiimote_node::NunSender, wiimote_node::ClasSender, and wiimote_node::WiiSender.
Definition at line 151 of file wiimote_node.py.
| def wiimote_node::WiimoteDataSender::canonicalizeWiistate | ( | self | ) |
Scale accelerator, nunchuk accelerator, and gyro readings to be m/sec^2, m/sec^2 and radians/sec, respectively.
Definition at line 194 of file wiimote_node.py.
| def wiimote_node::WiimoteDataSender::obtainWiimoteData | ( | self | ) |
Retrieve one set of Wiimote measurements from the Wiimote instance. Return scaled accelerator and gyro readings. We canonicalize both accelerator and gyro data through scaling them by constants that turn them into m/sec^2, and radians/sec, respectively. Return: list of canonicalized accelerator and gyro readings.
Definition at line 175 of file wiimote_node.py.
Definition at line 164 of file wiimote_node.py.
Definition at line 155 of file wiimote_node.py.
Definition at line 171 of file wiimote_node.py.
Definition at line 159 of file wiimote_node.py.
Definition at line 156 of file wiimote_node.py.
Definition at line 154 of file wiimote_node.py.
Definition at line 186 of file wiimote_node.py.

