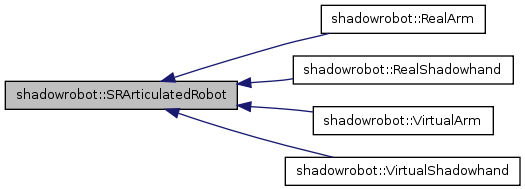
This is a parent class for the different types of Shadowhand we can have. It makes it possible to swap from a virtual to a real hand while using the same utilities to interact with the hand. One (or more) ROS subscriber and publisher can then share the same instance of a Shadowhand object to update the information contained in this object. More...
#include <sr_articulated_robot.h>
Public Types | |
| typedef std::map< std::string, JointData > | JointsMap |
| typedef std::map< std::string, enum controller_parameters > | ParametersMap |
Public Member Functions | |
| virtual JointsMap | getAllJointsData ()=0 |
| virtual void | getConfig (std::string joint_name)=0 |
| virtual JointControllerData | getContrl (std::string contrlr_name)=0 |
| virtual std::vector < DiagnosticData > | getDiagnostics ()=0 |
| virtual JointData | getJointData (std::string joint_name)=0 |
| virtual short | sendupdate (std::string joint_name, double target)=0 |
| virtual short | setConfig (std::vector< std::string > myConfig)=0 |
| virtual short | setContrl (std::string contrlr_name, JointControllerData ctrlr_data)=0 |
| SRArticulatedRobot () | |
| ~SRArticulatedRobot () | |
Public Attributes | |
| boost::mutex | controllers_map_mutex |
| JointsMap | joints_map |
| A mapping between the joint names and the information regarding those joints. | |
| boost::mutex | joints_map_mutex |
| ParametersMap | parameters_map |
| A mapping between the parameter names and their values. | |
| boost::mutex | parameters_map_mutex |
This is a parent class for the different types of Shadowhand we can have. It makes it possible to swap from a virtual to a real hand while using the same utilities to interact with the hand. One (or more) ROS subscriber and publisher can then share the same instance of a Shadowhand object to update the information contained in this object.
Definition at line 239 of file sr_articulated_robot.h.
| typedef std::map<std::string, JointData> shadowrobot::SRArticulatedRobot::JointsMap |
Definition at line 256 of file sr_articulated_robot.h.
| typedef std::map<std::string, enum controller_parameters> shadowrobot::SRArticulatedRobot::ParametersMap |
Definition at line 261 of file sr_articulated_robot.h.
| shadowrobot::SRArticulatedRobot::SRArticulatedRobot | ( | ) | [inline] |
empty constructor.
Definition at line 245 of file sr_articulated_robot.h.
| shadowrobot::SRArticulatedRobot::~SRArticulatedRobot | ( | ) | [inline] |
empty destructor.
Definition at line 253 of file sr_articulated_robot.h.
| virtual JointsMap shadowrobot::SRArticulatedRobot::getAllJointsData | ( | ) | [pure virtual] |
Get the data for all the joints.
Implemented in shadowrobot::RealArm, shadowrobot::RealShadowhand, shadowrobot::VirtualArm, and shadowrobot::VirtualShadowhand.
| virtual void shadowrobot::SRArticulatedRobot::getConfig | ( | std::string | joint_name | ) | [pure virtual] |
Get the config of the palm
| joint_name |
Implemented in shadowrobot::RealArm, shadowrobot::RealShadowhand, shadowrobot::VirtualArm, and shadowrobot::VirtualShadowhand.
| virtual JointControllerData shadowrobot::SRArticulatedRobot::getContrl | ( | std::string | contrlr_name | ) | [pure virtual] |
Get the controller parameters for a given controller name.
| contrlr_name | the name of the controller. |
Implemented in shadowrobot::RealArm, shadowrobot::RealShadowhand, shadowrobot::VirtualArm, and shadowrobot::VirtualShadowhand.
| virtual std::vector<DiagnosticData> shadowrobot::SRArticulatedRobot::getDiagnostics | ( | ) | [pure virtual] |
Get the diagnostics for the whole articulated robot.
Implemented in shadowrobot::RealArm, shadowrobot::RealShadowhand, shadowrobot::VirtualArm, and shadowrobot::VirtualShadowhand.
| virtual JointData shadowrobot::SRArticulatedRobot::getJointData | ( | std::string | joint_name | ) | [pure virtual] |
Get the joint data for a specific joint.
| joint_name | The name of the joint, as specified in joints_map. |
Implemented in shadowrobot::RealArm, shadowrobot::RealShadowhand, shadowrobot::VirtualArm, and shadowrobot::VirtualShadowhand.
| virtual short shadowrobot::SRArticulatedRobot::sendupdate | ( | std::string | joint_name, | |
| double | target | |||
| ) | [pure virtual] |
Generic method called to pass a new target to an articulated robot.
| joint_name | The Joint in joints_map you wish to send the target to. | |
| target | The target in degree |
Implemented in shadowrobot::RealArm, shadowrobot::RealShadowhand, shadowrobot::VirtualArm, and shadowrobot::VirtualShadowhand.
| virtual short shadowrobot::SRArticulatedRobot::setConfig | ( | std::vector< std::string > | myConfig | ) | [pure virtual] |
Set the config of the palm
| myConfig |
Implemented in shadowrobot::RealArm, shadowrobot::RealShadowhand, shadowrobot::VirtualArm, and shadowrobot::VirtualShadowhand.
| virtual short shadowrobot::SRArticulatedRobot::setContrl | ( | std::string | contrlr_name, | |
| JointControllerData | ctrlr_data | |||
| ) | [pure virtual] |
Set the controller parameters for a given controller name.
| contrlr_name | The name of the controller to setup. | |
| ctrlr_data | The data to pass to this controller. |
Implemented in shadowrobot::RealArm, shadowrobot::RealShadowhand, shadowrobot::VirtualArm, and shadowrobot::VirtualShadowhand.
Definition at line 330 of file sr_articulated_robot.h.
A mapping between the joint names and the information regarding those joints.
Definition at line 323 of file sr_articulated_robot.h.
| boost::mutex shadowrobot::SRArticulatedRobot::joints_map_mutex |
Definition at line 328 of file sr_articulated_robot.h.
A mapping between the parameter names and their values.
Definition at line 326 of file sr_articulated_robot.h.
Definition at line 329 of file sr_articulated_robot.h.

