#include "ros/time.h"#include <cmath>#include <ctime>#include <iomanip>#include <stdexcept>#include <limits>#include <boost/thread/mutex.hpp>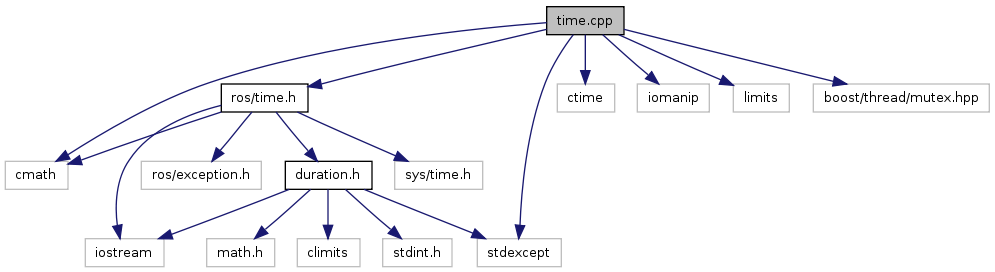
Go to the source code of this file.
Namespaces | |
| namespace | ros |
Defines | |
| #define | HAS_CLOCK_GETTIME (_POSIX_C_SOURCE >= 199309L) |
Functions | |
| const Duration | ros::DURATION_MAX (std::numeric_limits< int32_t >::max(), 999999999) |
| const Duration | ros::DURATION_MIN (std::numeric_limits< int32_t >::min(), 0) |
| static bool | ros::g_initialized (false) |
| static bool | ros::g_stopped (false) |
| static bool | ros::g_use_sim_time (true) |
| std::ostream & | ros::operator<< (std::ostream &os, const WallDuration &rhs) |
| std::ostream & | ros::operator<< (std::ostream &os, const WallTime &rhs) |
| std::ostream & | ros::operator<< (std::ostream &os, const Duration &rhs) |
| std::ostream & | ros::operator<< (std::ostream &os, const Time &rhs) |
| int | ros::ros_nanosleep (const uint32_t &sec, const uint32_t &nsec) |
| Simple representation of the rt library nanosleep function. | |
| bool | ros::ros_wallsleep (uint32_t sec, uint32_t nsec) |
| Go to the wall! | |
| void | ros::ros_walltime (uint32_t &sec, uint32_t &nsec) throw (NoHighPerformanceTimersException) |
| const Time | ros::TIME_MAX (std::numeric_limits< uint32_t >::max(), 999999999) |
| const Time | ros::TIME_MIN (0, 1) |
Variables | |
| static Time | ros::g_sim_time (0, 0) |
| static boost::mutex | ros::g_sim_time_mutex |

