ExtractIndices extracts a set of indices from a PointCloud as a separate PointCloud. More...
#include <extract_indices.h>
Public Member Functions | |
| ExtractIndices () | |
| Empty constructor. | |
| bool | getNegative () |
| Get the value of the internal negative parameter. If true, all points _except_ the input indices will be returned. | |
| void | setNegative (bool negative) |
| Set whether the indices should be returned, or all points _except_ the indices. | |
Protected Member Functions | |
| void | applyFilter (PointCloud2 &output) |
| Abstract filter method. | |
Protected Attributes | |
| bool | negative_ |
| If true, all the points _except_ the input indices will be returned. False by default. | |
Private Types | |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
| typedef PointCloud2::ConstPtr | PointCloud2ConstPtr |
| typedef PointCloud2::Ptr | PointCloud2Ptr |
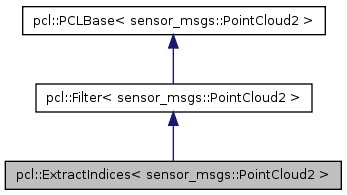
ExtractIndices extracts a set of indices from a PointCloud as a separate PointCloud.
Definition at line 104 of file extract_indices.h.
typedef sensor_msgs::PointCloud2 pcl::ExtractIndices< sensor_msgs::PointCloud2 >::PointCloud2 [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 109 of file extract_indices.h.
typedef PointCloud2::ConstPtr pcl::ExtractIndices< sensor_msgs::PointCloud2 >::PointCloud2ConstPtr [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 111 of file extract_indices.h.
typedef PointCloud2::Ptr pcl::ExtractIndices< sensor_msgs::PointCloud2 >::PointCloud2Ptr [private] |
Reimplemented from pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 110 of file extract_indices.h.
| pcl::ExtractIndices< sensor_msgs::PointCloud2 >::ExtractIndices | ( | ) | [inline] |
Empty constructor.
Definition at line 116 of file extract_indices.h.
| void pcl::ExtractIndices< sensor_msgs::PointCloud2 >::applyFilter | ( | PointCloud2 & | output | ) | [protected, virtual] |
Abstract filter method.
The implementation needs to set output.{data, row_step, point_step, width, height, is_dense}.
Implements pcl::Filter< sensor_msgs::PointCloud2 >.
Definition at line 45 of file extract_indices.cpp.
| bool pcl::ExtractIndices< sensor_msgs::PointCloud2 >::getNegative | ( | ) | [inline] |
Get the value of the internal negative parameter. If true, all points _except_ the input indices will be returned.
Definition at line 131 of file extract_indices.h.
| void pcl::ExtractIndices< sensor_msgs::PointCloud2 >::setNegative | ( | bool | negative | ) | [inline] |
Set whether the indices should be returned, or all points _except_ the indices.
| negative | true if all points _except_ the input indices will be returned, false otherwise |
Definition at line 126 of file extract_indices.h.
bool pcl::ExtractIndices< sensor_msgs::PointCloud2 >::negative_ [protected] |
If true, all the points _except_ the input indices will be returned. False by default.
Definition at line 137 of file extract_indices.h.

