#include <eigenTorques.h>
Public Member Functions | |
| virtual void | finalize ()=0 |
| Called after all the grasps have been processed. | |
| GraspProcessor (Hand *h) | |
| virtual void | processGrasp ()=0 |
| Called for each grasp in the list. | |
| virtual void | reset () |
| Resets the processor and prepares it for another list of grasps. | |
| virtual | ~GraspProcessor () |
Protected Attributes | |
| Hand * | mHand |
| The hand used in the optimization. | |
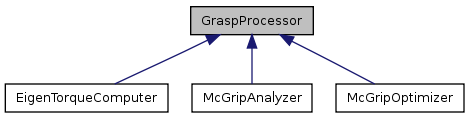
An interface for processing multiple grasps, usually for running some sort of optimization task.
Definition at line 34 of file eigenTorques.h.
| GraspProcessor::GraspProcessor | ( | Hand * | h | ) | [inline] |
Definition at line 39 of file eigenTorques.h.
| virtual GraspProcessor::~GraspProcessor | ( | ) | [inline, virtual] |
Definition at line 40 of file eigenTorques.h.
| virtual void GraspProcessor::finalize | ( | ) | [pure virtual] |
Called after all the grasps have been processed.
Implemented in EigenTorqueComputer, McGripAnalyzer, and McGripOptimizer.
| virtual void GraspProcessor::processGrasp | ( | ) | [pure virtual] |
Called for each grasp in the list.
Implemented in EigenTorqueComputer, McGripAnalyzer, and McGripOptimizer.
| virtual void GraspProcessor::reset | ( | ) | [inline, virtual] |
Resets the processor and prepares it for another list of grasps.
Reimplemented in EigenTorqueComputer, McGripAnalyzer, and McGripOptimizer.
Definition at line 43 of file eigenTorques.h.
Hand* GraspProcessor::mHand [protected] |
The hand used in the optimization.
Definition at line 37 of file eigenTorques.h.

