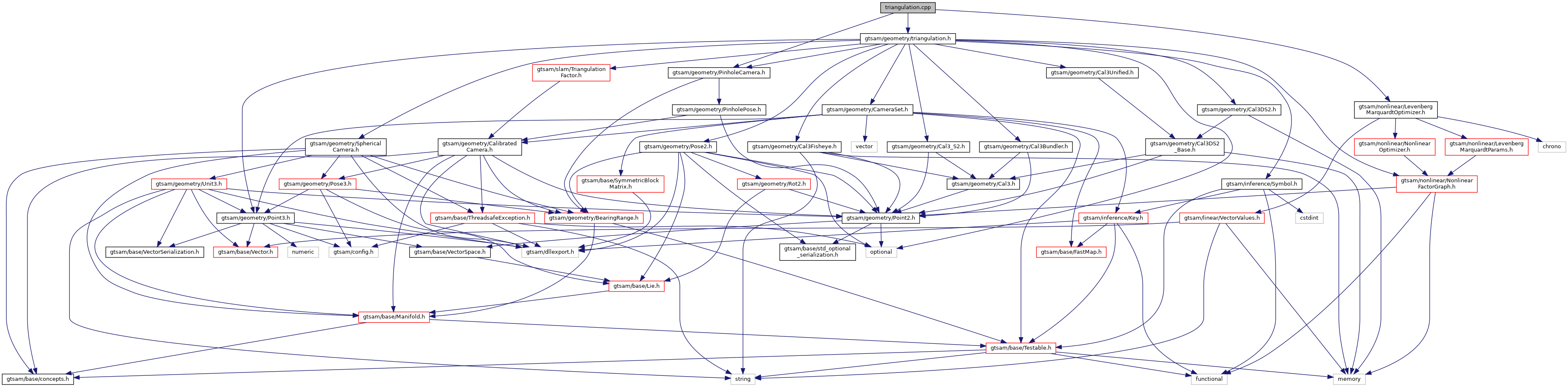
#include <gtsam/geometry/triangulation.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>
Include dependency graph for triangulation.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
Functions | |
| Point3 | gtsam::optimize (const NonlinearFactorGraph &graph, const Values &values, Key landmarkKey) |
| Point3 | gtsam::triangulateDLT (const std::vector< Matrix34, Eigen::aligned_allocator< Matrix34 >> &projection_matrices, const Point2Vector &measurements, double rank_tol) |
| Point3 | gtsam::triangulateDLT (const std::vector< Matrix34, Eigen::aligned_allocator< Matrix34 >> &projection_matrices, const std::vector< Unit3 > &measurements, double rank_tol) |
| Vector4 | gtsam::triangulateHomogeneousDLT (const std::vector< Matrix34, Eigen::aligned_allocator< Matrix34 >> &projection_matrices, const Point2Vector &measurements, double rank_tol) |
| Vector4 | gtsam::triangulateHomogeneousDLT (const std::vector< Matrix34, Eigen::aligned_allocator< Matrix34 >> &projection_matrices, const std::vector< Unit3 > &measurements, double rank_tol) |
| Point3 | gtsam::triangulateLOST (const std::vector< Pose3 > &poses, const Point3Vector &calibratedMeasurements, const SharedIsotropic &measurementNoise, double rank_tol=1e-9) |
| Triangulation using the LOST (Linear Optimal Sine Triangulation) algorithm proposed in https://arxiv.org/pdf/2205.12197.pdf by Sebastien Henry and John Christian. More... | |