#include <gtsam/linear/NoiseModel.h>#include <gtsam/base/TestableAssertions.h>#include <CppUnitLite/TestHarness.h>#include <iostream>#include <limits>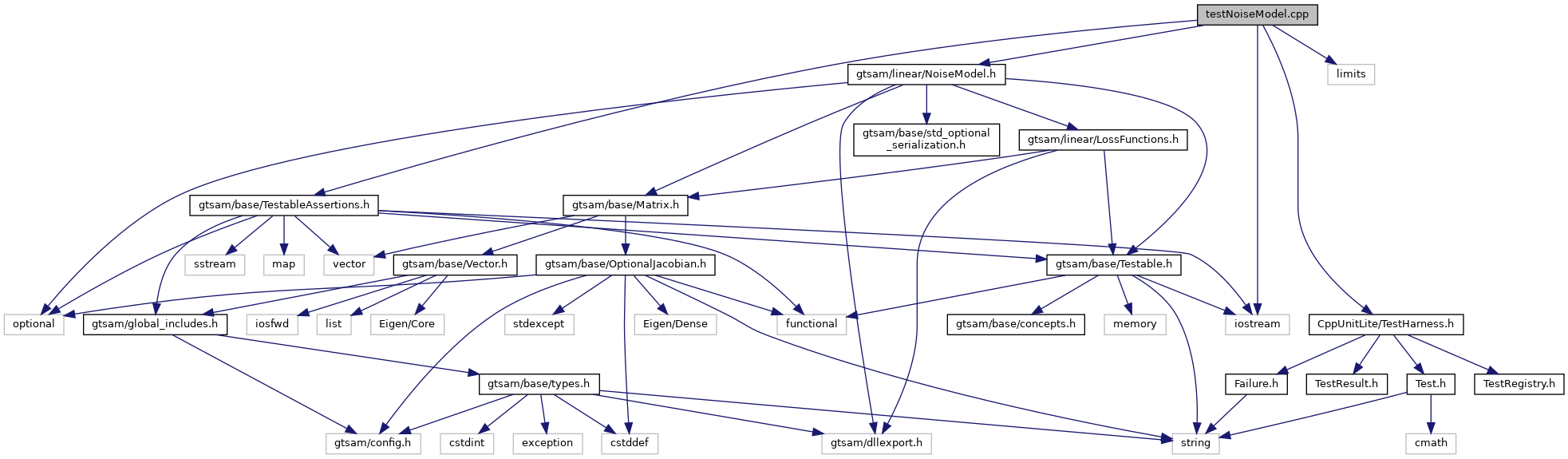
Go to the source code of this file.
Namespaces | |
| exampleQR | |
Macros | |
| #define | TEST_GAUSSIAN(gaussian) |
Functions | |
| static const Vector3 | kSigmas (kSigma, kSigma, kSigma) |
| int | main () |
| TEST (NoiseModel, ConstrainedAll) | |
| TEST (NoiseModel, ConstrainedConstructors) | |
| TEST (NoiseModel, ConstrainedMixed) | |
| TEST (NoiseModel, constructors) | |
| TEST (NoiseModel, equals) | |
| TEST (NoiseModel, FullyConstrained) | |
| TEST (NoiseModel, lossFunctionAtZero) | |
| TEST (NoiseModel, MixedQR) | |
| TEST (NoiseModel, MixedQR2) | |
| TEST (NoiseModel, NegLogNormalizationConstant1D) | |
| TEST (NoiseModel, NegLogNormalizationConstant3D) | |
| TEST (NoiseModel, NonDiagonalGaussian) | |
| TEST (NoiseModel, OverdeterminedQR) | |
| TEST (NoiseModel, QR) | |
| TEST (NoiseModel, QRNan) | |
| TEST (NoiseModel, robustFunctionAsymmetricCauchy) | |
| TEST (NoiseModel, robustFunctionAsymmetricTukey) | |
| TEST (NoiseModel, robustFunctionCauchy) | |
| TEST (NoiseModel, robustFunctionDCS) | |
| TEST (NoiseModel, robustFunctionFair) | |
| TEST (NoiseModel, robustFunctionGemanMcClure) | |
| TEST (NoiseModel, robustFunctionHuber) | |
| TEST (NoiseModel, robustFunctionL2WithDeadZone) | |
| TEST (NoiseModel, robustFunctionTukey) | |
| TEST (NoiseModel, robustFunctionWelsch) | |
| TEST (NoiseModel, robustNoiseCustomHuber) | |
| TEST (NoiseModel, robustNoiseDCS) | |
| TEST (NoiseModel, robustNoiseGemanMcClure) | |
| TEST (NoiseModel, robustNoiseHuber) | |
| TEST (NoiseModel, robustNoiseL2WithDeadZone) | |
| TEST (NoiseModel, ScalarOrVector) | |
| TEST (NoiseModel, SmartCovariance) | |
| TEST (NoiseModel, SmartInformation) | |
| TEST (NoiseModel, SmartSqrtInformation) | |
| TEST (NoiseModel, SmartSqrtInformation2) | |
| TEST (NoiseModel, Unit) | |
| TEST (NoiseModel, WhitenInPlace) | |
Variables | |
| Matrix | exampleQR::Ab |
| SharedDiagonal | exampleQR::diagonal = noiseModel::Diagonal::Sigmas(sigmas) |
| static const Matrix | kCovariance = I_3x3 * kVariance |
| static const double | kInverseSigma = 1.0 / kSigma |
| static const double | kSigma = 2 |
| static const double | kVariance = kSigma * kSigma |
| static const double | prc = 1.0 / kVariance |
| static const Matrix | R = I_3x3 * kInverseSigma |
| Matrix | exampleQR::Rd |
| Vector | exampleQR::sigmas = (Vector(4) << 0.2, 0.2, 0.1, 0.1).finished() |
Detailed Description
- Date
- Jan 13, 2010
Definition in file testNoiseModel.cpp.
Macro Definition Documentation
◆ TEST_GAUSSIAN
| #define TEST_GAUSSIAN | ( | gaussian | ) |
Definition at line 772 of file testNoiseModel.cpp.
Function Documentation
◆ kSigmas()
◆ main()
| int main | ( | ) |
Definition at line 888 of file testNoiseModel.cpp.
◆ TEST() [1/37]
| TEST | ( | NoiseModel | , |
| ConstrainedAll | |||
| ) |
Definition at line 189 of file testNoiseModel.cpp.
◆ TEST() [2/37]
| TEST | ( | NoiseModel | , |
| ConstrainedConstructors | |||
| ) |
- ************************************************************************* */
Definition at line 146 of file testNoiseModel.cpp.
◆ TEST() [3/37]
| TEST | ( | NoiseModel | , |
| ConstrainedMixed | |||
| ) |
Definition at line 174 of file testNoiseModel.cpp.
◆ TEST() [4/37]
| TEST | ( | NoiseModel | , |
| constructors | |||
| ) |
Definition at line 40 of file testNoiseModel.cpp.
◆ TEST() [5/37]
| TEST | ( | NoiseModel | , |
| equals | |||
| ) |
Definition at line 109 of file testNoiseModel.cpp.
◆ TEST() [6/37]
| TEST | ( | NoiseModel | , |
| FullyConstrained | |||
| ) |
Definition at line 356 of file testNoiseModel.cpp.
◆ TEST() [7/37]
| TEST | ( | NoiseModel | , |
| lossFunctionAtZero | |||
| ) |
Definition at line 735 of file testNoiseModel.cpp.
◆ TEST() [8/37]
| TEST | ( | NoiseModel | , |
| MixedQR | |||
| ) |
Definition at line 284 of file testNoiseModel.cpp.
◆ TEST() [9/37]
| TEST | ( | NoiseModel | , |
| MixedQR2 | |||
| ) |
Definition at line 317 of file testNoiseModel.cpp.
◆ TEST() [10/37]
| TEST | ( | NoiseModel | , |
| NegLogNormalizationConstant1D | |||
| ) |
Definition at line 810 of file testNoiseModel.cpp.
◆ TEST() [11/37]
| TEST | ( | NoiseModel | , |
| NegLogNormalizationConstant3D | |||
| ) |
Definition at line 847 of file testNoiseModel.cpp.
◆ TEST() [12/37]
| TEST | ( | NoiseModel | , |
| NonDiagonalGaussian | |||
| ) |
Definition at line 784 of file testNoiseModel.cpp.
◆ TEST() [13/37]
| TEST | ( | NoiseModel | , |
| OverdeterminedQR | |||
| ) |
Definition at line 252 of file testNoiseModel.cpp.
◆ TEST() [14/37]
| TEST | ( | NoiseModel | , |
| QR | |||
| ) |
Definition at line 225 of file testNoiseModel.cpp.
◆ TEST() [15/37]
| TEST | ( | NoiseModel | , |
| QRNan | |||
| ) |
Definition at line 379 of file testNoiseModel.cpp.
◆ TEST() [16/37]
| TEST | ( | NoiseModel | , |
| robustFunctionAsymmetricCauchy | |||
| ) |
Definition at line 508 of file testNoiseModel.cpp.
◆ TEST() [17/37]
| TEST | ( | NoiseModel | , |
| robustFunctionAsymmetricTukey | |||
| ) |
Definition at line 571 of file testNoiseModel.cpp.
◆ TEST() [18/37]
| TEST | ( | NoiseModel | , |
| robustFunctionCauchy | |||
| ) |
Definition at line 492 of file testNoiseModel.cpp.
◆ TEST() [19/37]
| TEST | ( | NoiseModel | , |
| robustFunctionDCS | |||
| ) |
Definition at line 587 of file testNoiseModel.cpp.
◆ TEST() [20/37]
| TEST | ( | NoiseModel | , |
| robustFunctionFair | |||
| ) |
Definition at line 460 of file testNoiseModel.cpp.
◆ TEST() [21/37]
| TEST | ( | NoiseModel | , |
| robustFunctionGemanMcClure | |||
| ) |
Definition at line 524 of file testNoiseModel.cpp.
◆ TEST() [22/37]
| TEST | ( | NoiseModel | , |
| robustFunctionHuber | |||
| ) |
Definition at line 476 of file testNoiseModel.cpp.
◆ TEST() [23/37]
| TEST | ( | NoiseModel | , |
| robustFunctionL2WithDeadZone | |||
| ) |
Definition at line 599 of file testNoiseModel.cpp.
◆ TEST() [24/37]
| TEST | ( | NoiseModel | , |
| robustFunctionTukey | |||
| ) |
Definition at line 555 of file testNoiseModel.cpp.
◆ TEST() [25/37]
| TEST | ( | NoiseModel | , |
| robustFunctionWelsch | |||
| ) |
Definition at line 539 of file testNoiseModel.cpp.
◆ TEST() [26/37]
| TEST | ( | NoiseModel | , |
| robustNoiseCustomHuber | |||
| ) |
Definition at line 707 of file testNoiseModel.cpp.
◆ TEST() [27/37]
| TEST | ( | NoiseModel | , |
| robustNoiseDCS | |||
| ) |
Definition at line 668 of file testNoiseModel.cpp.
◆ TEST() [28/37]
| TEST | ( | NoiseModel | , |
| robustNoiseGemanMcClure | |||
| ) |
Definition at line 640 of file testNoiseModel.cpp.
◆ TEST() [29/37]
| TEST | ( | NoiseModel | , |
| robustNoiseHuber | |||
| ) |
Definition at line 620 of file testNoiseModel.cpp.
◆ TEST() [30/37]
| TEST | ( | NoiseModel | , |
| robustNoiseL2WithDeadZone | |||
| ) |
Definition at line 691 of file testNoiseModel.cpp.
◆ TEST() [31/37]
| TEST | ( | NoiseModel | , |
| ScalarOrVector | |||
| ) |
Definition at line 431 of file testNoiseModel.cpp.
◆ TEST() [32/37]
| TEST | ( | NoiseModel | , |
| SmartCovariance | |||
| ) |
Definition at line 422 of file testNoiseModel.cpp.
◆ TEST() [33/37]
| TEST | ( | NoiseModel | , |
| SmartInformation | |||
| ) |
Definition at line 411 of file testNoiseModel.cpp.
◆ TEST() [34/37]
| TEST | ( | NoiseModel | , |
| SmartSqrtInformation | |||
| ) |
Definition at line 393 of file testNoiseModel.cpp.
◆ TEST() [35/37]
| TEST | ( | NoiseModel | , |
| SmartSqrtInformation2 | |||
| ) |
Definition at line 402 of file testNoiseModel.cpp.
◆ TEST() [36/37]
| TEST | ( | NoiseModel | , |
| Unit | |||
| ) |
Definition at line 101 of file testNoiseModel.cpp.
◆ TEST() [37/37]
| TEST | ( | NoiseModel | , |
| WhitenInPlace | |||
| ) |
Definition at line 440 of file testNoiseModel.cpp.
Variable Documentation
◆ kCovariance
Definition at line 36 of file testNoiseModel.cpp.
◆ kInverseSigma
|
static |
Definition at line 33 of file testNoiseModel.cpp.
◆ kSigma
|
static |
Definition at line 33 of file testNoiseModel.cpp.
◆ kVariance
Definition at line 34 of file testNoiseModel.cpp.
◆ prc
|
static |
Definition at line 34 of file testNoiseModel.cpp.
◆ R
|
static |
Definition at line 35 of file testNoiseModel.cpp.