3D rotation represented as a rotation matrix or quaternion More...
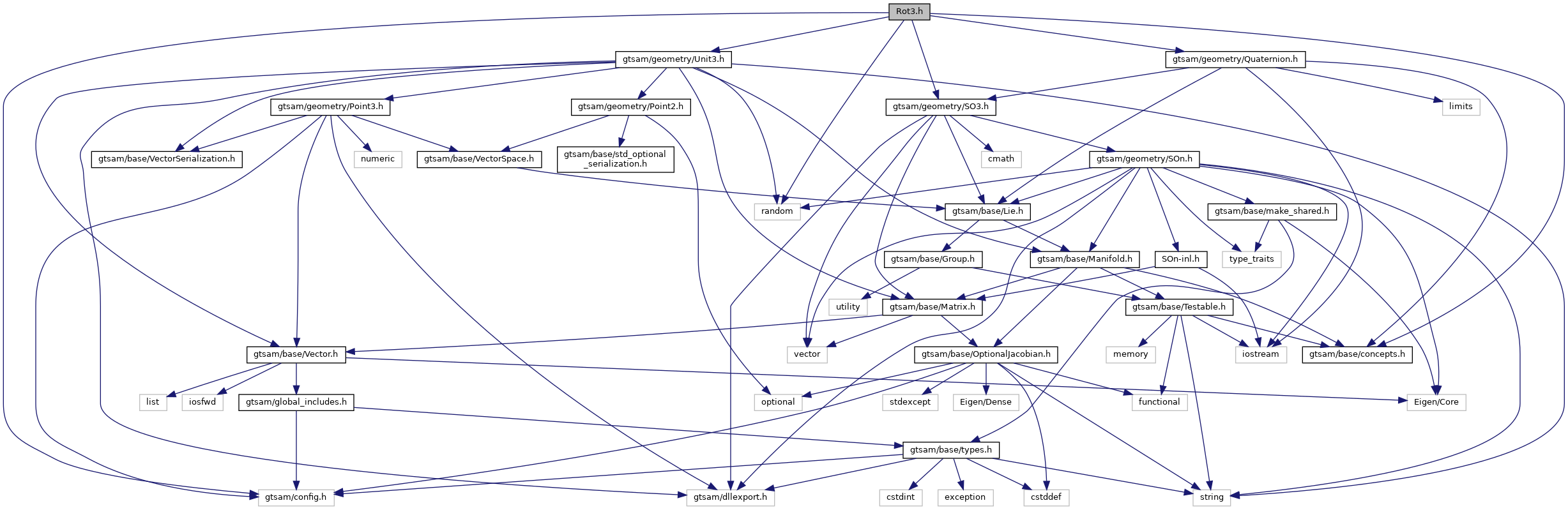
#include <gtsam/geometry/Unit3.h>#include <gtsam/geometry/Quaternion.h>#include <gtsam/geometry/SO3.h>#include <gtsam/base/concepts.h>#include <gtsam/config.h>#include <random>
Include dependency graph for Rot3.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | gtsam::Rot3::CayleyChart |
| struct | gtsam::Rot3::ChartAtOrigin |
| class | gtsam::Rot3 |
| Rot3 is a 3D rotation represented as a rotation matrix if the preprocessor symbol GTSAM_USE_QUATERNIONS is not defined, or as a quaternion if it is defined. More... | |
| struct | gtsam::traits< const Rot3 > |
| struct | gtsam::traits< Rot3 > |
Namespaces | |
| gtsam | |
| traits | |
Macros | |
| #define | ROT3_DEFAULT_COORDINATES_MODE Rot3::CAYLEY |
Typedefs | |
| using | gtsam::Rot3Vector = list |
| std::vector of Rot3s, used in Matlab wrapper More... | |
Functions | |
| pair< Matrix3, Vector3 > | gtsam::RQ (const Matrix3 &A, OptionalJacobian< 3, 9 > H) |
Detailed Description
3D rotation represented as a rotation matrix or quaternion
Definition in file Rot3.h.