CollisionSpaceMonitor is a class which in addition to being aware of a robot model, is also aware of a collision space. More...
#include <collision_space_monitor.h>
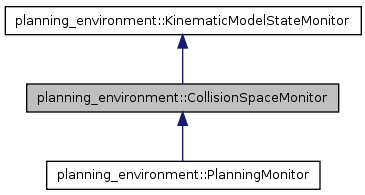
CollisionSpaceMonitor is a class which in addition to being aware of a robot model, is also aware of a collision space.
Definition at line 54 of file collision_space_monitor.h.
| planning_environment::CollisionSpaceMonitor::CollisionSpaceMonitor | ( | CollisionModels * | cm, | |
| tf::TransformListener * | tf | |||
| ) | [inline] |
Definition at line 58 of file collision_space_monitor.h.
| virtual planning_environment::CollisionSpaceMonitor::~CollisionSpaceMonitor | ( | void | ) | [inline, virtual] |
Definition at line 64 of file collision_space_monitor.h.
| bool planning_environment::CollisionSpaceMonitor::attachObjectCallback | ( | const arm_navigation_msgs::AttachedCollisionObjectConstPtr & | attachedObject | ) | [protected, virtual] |
Definition at line 371 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::collisionMapAsBoxes | ( | const arm_navigation_msgs::CollisionMapConstPtr & | collisionMap, | |
| std::vector< shapes::Shape * > & | boxes, | |||
| std::vector< btTransform > & | poses | |||
| ) | [protected] |
Definition at line 288 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::collisionMapAsBoxes | ( | const arm_navigation_msgs::CollisionMap & | collisionMap, | |
| std::vector< shapes::Shape * > & | boxes, | |||
| std::vector< btTransform > & | poses | |||
| ) | [protected] |
Definition at line 294 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::collisionMapAsSpheres | ( | const arm_navigation_msgs::CollisionMapConstPtr & | collisionMap, | |
| std::vector< shapes::Shape * > & | spheres, | |||
| std::vector< btTransform > & | poses | |||
| ) | [protected] |
Definition at line 232 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::collisionMapCallback | ( | const arm_navigation_msgs::CollisionMapConstPtr & | collisionMap | ) | [protected] |
Definition at line 227 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::collisionMapUpdateCallback | ( | const arm_navigation_msgs::CollisionMapConstPtr & | collisionMap | ) | [protected] |
Definition at line 221 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::collisionObjectCallback | ( | const arm_navigation_msgs::CollisionObjectConstPtr & | collisionObject | ) | [protected] |
Definition at line 366 of file collision_space_monitor.cpp.
| CollisionModels* planning_environment::CollisionSpaceMonitor::getCollisionModels | ( | void | ) | const [inline] |
Return the instance of collision models that is being used.
Definition at line 102 of file collision_space_monitor.h.
| const collision_space::EnvironmentModel* planning_environment::CollisionSpaceMonitor::getEnvironmentModel | ( | void | ) | const [inline] |
Return the instance of the environment model maintained.
Definition at line 96 of file collision_space_monitor.h.
| double planning_environment::CollisionSpaceMonitor::getPointCloudPadd | ( | void | ) | const [inline] |
Returns the padding used for pointclouds (for collision checking).
Definition at line 126 of file collision_space_monitor.h.
| bool planning_environment::CollisionSpaceMonitor::haveMap | ( | void | ) | const [inline] |
Return true if map has been received.
Definition at line 108 of file collision_space_monitor.h.
| bool planning_environment::CollisionSpaceMonitor::isEnvironmentMonitorStarted | ( | void | ) | const [inline] |
Check if the environment monitor is currently started.
Definition at line 90 of file collision_space_monitor.h.
| bool planning_environment::CollisionSpaceMonitor::isMapUpdated | ( | double | sec | ) | const |
Return true if a map update has been received in the last sec seconds. If sec < 10us, this function always returns true.
Definition at line 180 of file collision_space_monitor.cpp.
| const ros::Time& planning_environment::CollisionSpaceMonitor::lastMapUpdate | ( | void | ) | const [inline] |
Return the last update time for the map.
Definition at line 120 of file collision_space_monitor.h.
| void planning_environment::CollisionSpaceMonitor::setupCSM | ( | void | ) | [protected] |
Definition at line 52 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::setUseCollisionMap | ( | bool | use | ) |
Definition at line 99 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::startEnvironmentMonitor | ( | void | ) |
Start the environment monitor. By default, the monitor is started after creation.
Definition at line 70 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::stopEnvironmentMonitor | ( | void | ) |
Stop the environment monitor.
Definition at line 137 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::updateCollisionSpace | ( | const arm_navigation_msgs::CollisionMapConstPtr & | collisionMap, | |
| bool | clear | |||
| ) | [protected] |
Definition at line 353 of file collision_space_monitor.cpp.
| void planning_environment::CollisionSpaceMonitor::waitForMap | ( | void | ) | const |
Wait until a map is received.
Definition at line 202 of file collision_space_monitor.cpp.
message_filters::Subscriber<arm_navigation_msgs::AttachedCollisionObject>* planning_environment::CollisionSpaceMonitor::attachedCollisionObjectSubscriber_ [protected] |
Definition at line 163 of file collision_space_monitor.h.
Definition at line 148 of file collision_space_monitor.h.
boost::recursive_mutex planning_environment::CollisionSpaceMonitor::collision_map_lock_ [protected] |
Definition at line 167 of file collision_space_monitor.h.
tf::MessageFilter<arm_navigation_msgs::CollisionMap>* planning_environment::CollisionSpaceMonitor::collisionMapFilter_ [protected] |
Definition at line 157 of file collision_space_monitor.h.
message_filters::Subscriber<arm_navigation_msgs::CollisionMap>* planning_environment::CollisionSpaceMonitor::collisionMapSubscriber_ [protected] |
Definition at line 156 of file collision_space_monitor.h.
tf::MessageFilter<arm_navigation_msgs::CollisionMap>* planning_environment::CollisionSpaceMonitor::collisionMapUpdateFilter_ [protected] |
Definition at line 159 of file collision_space_monitor.h.
message_filters::Subscriber<arm_navigation_msgs::CollisionMap>* planning_environment::CollisionSpaceMonitor::collisionMapUpdateSubscriber_ [protected] |
Definition at line 158 of file collision_space_monitor.h.
tf::MessageFilter<arm_navigation_msgs::CollisionObject>* planning_environment::CollisionSpaceMonitor::collisionObjectFilter_ [protected] |
Definition at line 161 of file collision_space_monitor.h.
message_filters::Subscriber<arm_navigation_msgs::CollisionObject>* planning_environment::CollisionSpaceMonitor::collisionObjectSubscriber_ [protected] |
Definition at line 160 of file collision_space_monitor.h.
bool planning_environment::CollisionSpaceMonitor::envMonitorStarted_ [protected] |
Definition at line 151 of file collision_space_monitor.h.
bool planning_environment::CollisionSpaceMonitor::have_map_ [protected] |
Definition at line 153 of file collision_space_monitor.h.
Definition at line 154 of file collision_space_monitor.h.
double planning_environment::CollisionSpaceMonitor::pointcloud_padd_ [protected] |
Definition at line 149 of file collision_space_monitor.h.
bool planning_environment::CollisionSpaceMonitor::use_collision_map_ [protected] |
Definition at line 165 of file collision_space_monitor.h.

