#include <fstream>#include <vector>#include <boost/math/constants/constants.hpp>#include <LinearMath/btTransform.h>#include "collision_checking/collision.h"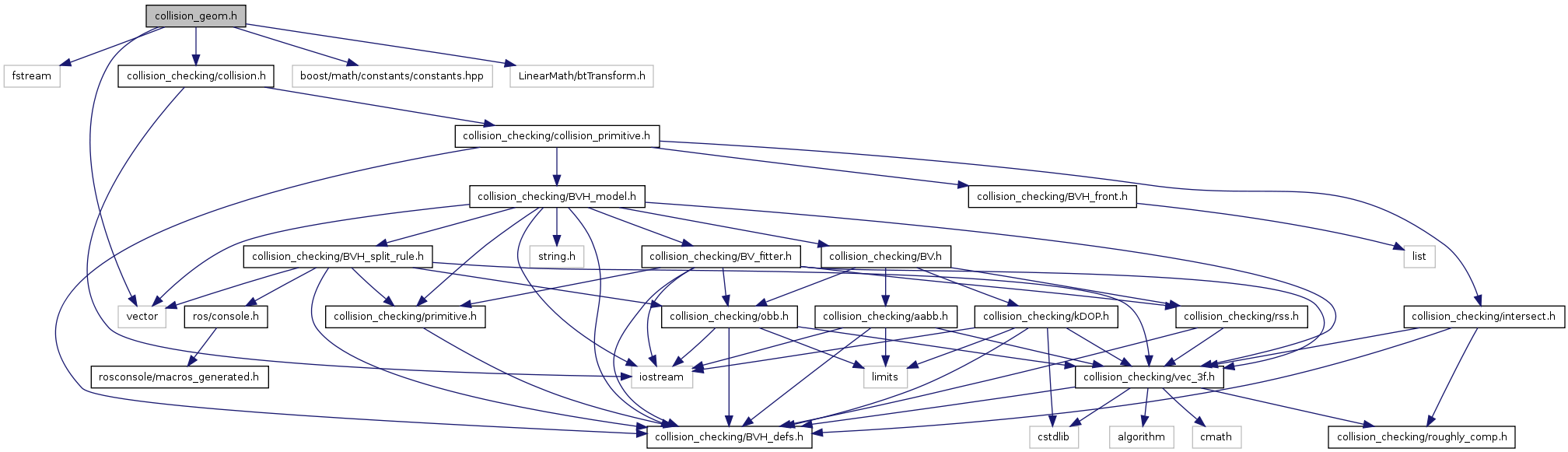
Go to the source code of this file.
Classes | |
| struct | collision_checking::CollisionGeom |
| struct | collision_checking::CollisionMesh< BV > |
| struct | collision_checking::CollisionMesh< OBB > |
| Specialization for OBB. More... | |
Namespaces | |
| namespace | collision_checking |
Main namespace. | |
Functions | |
| template<typename BV > | |
| CollisionMesh< BV > * | collision_checking::makeBox (double a, double b, double c) |
| template<typename BV > | |
| CollisionMesh< BV > * | collision_checking::makeCylinder (double r, double h, unsigned int tot=16) |
| template<typename BV > | |
| CollisionMesh< BV > * | collision_checking::makeMesh (const std::vector< Vec3f > &points, const std::vector< Triangle > &tri_indices) |
| template<typename BV > | |
| CollisionMesh< BV > * | collision_checking::makeSphere (double r, unsigned int seg=16, unsigned int ring=16) |
| void | collision_checking::saveOBjFile (const std::string &name, const std::vector< Vec3f > &points, const std::vector< Triangle > &tri_indices) |

